
Page 100 - 2021年第52卷第9期
P. 100
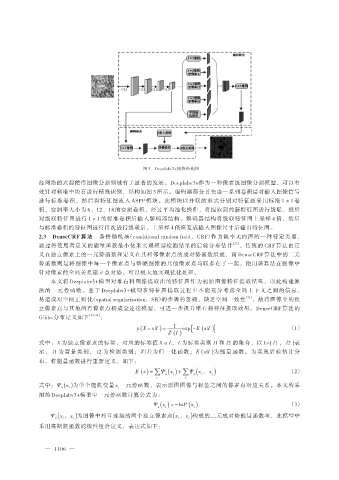
图 3 Deeplabv3+网络结构图
经网络的兴起使得图像分割领域有了显著的发展。Deeplabv3+作为一种像素级图像分割模型,可以有
效针对料堆中块石进行精准识别,结构如图 3 所示。编码器部分首先由一系列卷积层对输入图像信号
进行标准卷积,然后将特征图流入 ASPP 模块。此模块以并联的形式分别对特征图采用标准 1 ´ 1 卷
积,空洞率大小为 6、12、18 的空洞卷积,经过平均池化操作,将提取到的新特征图进行级联,最后
对级联特征图进行 1 ´ 1 的标准卷积后输入解码器结构。解码器结构将级联特征图上采样 4 倍,然后
与标准卷积的特征图进行再次进行级联后,上采样 4 倍恢复成输入图像尺寸后输出特征图。
2.3 DenseCRF 算法 条件随机场(conditional random field,CRF)作为概率无向图的一种特定类型,
通过将使用者定义的能量函数最小化来实现模型检测结果的后验分布估计 [32] 。传统的 CRF 算法由定
义在独立像素上的一元势函数和定义在其相邻像素点的成对势函数组成,而 DenseCRF 算法中的二元
势函数则是将图像中每一个像素点与整幅图像的其他像素点均联系在了一起,使用该算法在图像中
针对像素的全局关系建立点对势,可以极大地实现优化处理。
本文将 Deeplabv3+模型对堆石料图像提取出的特征图作为初始图像特征提取结果,以此构建算
法的一元势函数。鉴于 Deeplabv3+模型在特征图提取过程中不能充分考虑全局上下文之间的信息,
易造成对空间正则化(spatial regularization,SR)的步骤的忽视,缺乏空间一致性 [32] ,故将图像中的独
立像素点与其他所有像素点构成全连接模型,可进一步提升堆石料特征提取效果。DenseCRF 算法的
Gibbs 分布定义如下 [33-34] :
)
p(X = x|I = 1 exp[-E (x|I ] ) (1)
Z ( )
I
式中:X 为独立像素点的标签,对应的标签值 X∈L,L 为标签类别 l1 和 l2 的集合,以 L={ l1 , l2 }表
示, l1 为背景类别, l2 为检测类别;Z(I)为归一化函数;E (x|I )为能量函数。为实现后验估计分
布,将能量函数进行重新定义,如下:
E ( ) x = å ( ) + å ( x ,x j ) (2)
Ψ x
Ψ
u
i
p
i
i i
式中:Ψ u ( )为单个随机变量 x 一元势函数,表示原图图像与标签之间的像素点对应关系。本文所采
x i
i
用的 Deeplabv3+模型中一元势函数计算公式为:
Ψ ( ) = -InP ( ) (3)
x
x
i
i
u
Ψ p(x i ,x j )为图像中相互连接的两个独立像素点(x i ,x j )构成的二元成对势能量函数项,此模型中
采用高斯核函数的线性组合定义,表达式如下:
— 1106 —