
Page 77 - 水利学报2021年第52卷第1期
P. 77
l
l
l
( f )、输入门( i )和输出门( o )构成,用于决定数据更新或丢弃。具体来说,遗忘门控制上一时
t
t
t
l
͂
刻内部状态(C l )需遗忘的信息量,输入门控制当前时刻候选状态(C )需保存的信息量,而输出门
t - 1 t
l
l
则控制当前时刻内部状态(C )需输出给外部状态( h )的信息量。其对应计算过程如下:
t
t
͂
l
l
(1)利用上一时刻外部状态( h l )和当前时刻输入( h l - 1 ),计算出 f l 、 i 和 C :
t - 1 t - 1 t t t
l
f t l = σ ( w ×[ h t - 1 ,h t - 1 ] + b f ) (1)
l - 1
f
l
l
i = σ ( w ×[ h t - 1 ,h l - 1 ] + b i ) (2)
i
t
t - 1
͂
l
l
C = tanh( w ×[ h t - 1 ,h t - 1 ] + b C ) (3)
l - 1
t
C
l
l
(2)结合 f t l 和 i 更新记忆单元状态(C ):
t
t
l
l
l
l
C = f C t - 1 + i C ͂ t l (4)
t
t
t
l
l
l
(3)通过 o 将 C 信息传递给 h :
t
t
t
l
o = σ ( w ×[ h l t - 1 ,h t - 1 ] + b o ) (5)
l - 1
t
o
h = o tanh( ) (6)
l
l
l
C
t
t
t
式中: σ (×) 、 tanh(×) 分别为 Sigmoid 函数和双曲正切函数; w 、 b 分别为权重矩阵和偏置向量; 表
示两向量的标量积。
σ σ σ
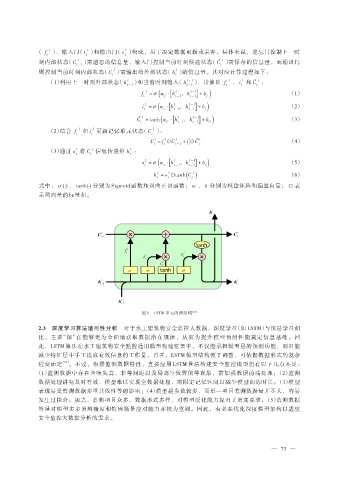
图 1 LSTM 单元内部结构 [25]
2.3 深度学习算法适用性分析 对于水工建筑物安全监控大数据,深度学习(如 LSTM)与浅层学习相
比,主要“深”在能够更为全面地获取数据潜在规律,从而为提升模型预测性能奠定信息基础。因
此,LSTM 算法在水工建筑物安全监控通用模型构建框架中,不仅能承担模型层的预测功能,而且能
减少特征层中手工提取有效信息的工作量。再者,LSTM 模型结构便于调整,可依据数据形式的复杂
程度而定 [33] 。不过,根据监测数据特性,直接应用 LSTM 算法构建安全监控模型仍有以下几点不足:
(1)监测数据中存在含噪失真、非等间距以及局部空值野值等现象,需加强数据前端处理;(2)监测
数据处理讲究及时有效,模型难以实现全数据处理,需限定记忆区间以减少模型训练时长;(3)模型
表现易受监测数据多重共线性等的影响;(4)模型超参数较多,而单一项目监测数据量并不大,容易
发生过拟合;加之,监测项目众多,数据形式多样,对模型泛化能力提出了更高要求;(5)监测数据
外延对模型多步预测精度和特殊场景应对能力亦较为重视。因此,有必要优化深度模型架构以适应
安全监控大数据分析的需求。
— 73 —