
Page 116 - 水利学报2021年第52卷第5期
P. 116
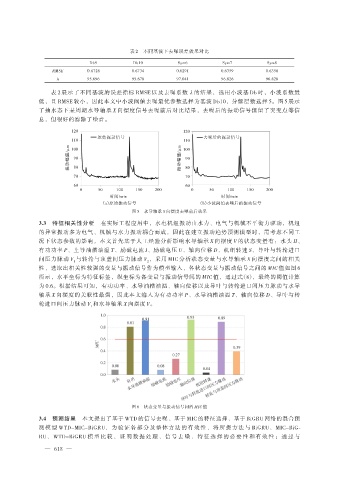
表 2 不同基波下去噪误差效果对比
Db9 Db10 Sym6 Sym7 Sym8
RMSE O.6728 0.6734 0.6291 0.6359 0.6358
λ 95.696 95.678 97.041 96.826 96.828
表 2 展示了不同基波的误差指标 RMSE 以及去噪系数 λ 的结果,选用小波基 Db 时,小波系数最
低,且 RMSE 较小,因此本文中小波阈值去噪最优参数选择为基波 Db10,分解层数选择 5。图 5 展示
了抽水态下某周期水导轴承 X 向摆度信号去噪前后对比结果,去噪后的振动信号保留了突变点等信
息,但很好的滤除了噪音。
120 120
原始振动信号 去噪后的振动信号
110 110
振动幅值/μm 100 振动幅值/μm 100
90
90
80
70 80
70
60 60
0 50 100 150 200 0 50 100 150 200
时间/min 时间/min
(a)原始振动信号 (b)小波阈值去噪后的振动信号
图 5 水导轴承 X 向摆度去噪前后效果
3.3 特征相关性分析 在实际工程应用中,水电机组振动由水力、电气与机械不平衡力驱动,机组
的异常振动多为电气、机械与水力振动耦合而成,因此在建立振动趋势预测模型时,需考虑不同工
况下状态参数的影响,本文首先基于人工经验分析影响水导轴承 X 向摆度 V 的状态变量有:水头 H、
有功功率 P、上导油槽油温 T、励磁电流 I、励磁电压 U、轴向位移 D、机组转速 S、导叶与转轮进口
间压力脉动 V 与转轮与顶盖间压力脉动 V ,采用 MIC 分析状态变量与水导轴承 X 向摆度之间的相关
1 2
性,选取出相关性较强的变量与振动信号作为模型输入,各状态变量与振动信号之间的 MIC 值如图 6
所示,水平坐标为特征标签,纵坐标为各变量与振动信号间的 MIC 值,通过式(8),最终的阈值计算
为 0.6。根据结果可知,有功功率、水导油槽油温、轴向位移以及导叶与转轮进口间压力脉动与水导
轴承 X 向摆度的关联性最强,因此本文输入为有功功率 P、水导油槽油温 T、轴向位移 D、导叶与转
轮进口间压力脉动 V 和水导轴承 X 向摆度 V。
1
图 6 状态变量与振动信号间的 MIC 值
3.4 预测结果 本文提出了基于 WTD 的信号去噪、基于 MIC 的特征选择、基于 BiGRU 网络的混合预
测模型 WTD-MIC-BiGRU,为验证各部分及整体方法的有效性,将所提方法与 BiGRU、MIC-BiG⁃
RU、 WTD-BiGRU 模 型 比 较 , 证 明 数 据 处 理 、 信 号 去 噪 、 特 征 选 择 的 必 要 性 和 有 效 性 ; 通 过 与
— 618 —