
Page 55 - 2025年第56卷第9期
P. 55
点所组成的三角网格。生成贴图视角后,将连续且共有一个贴图视角的面片作为一个块区域,根据纹
理图将对应坐标的图像纹理映射至各点坐标即可生成纹理贴图,得到构建的混凝土结构实景模型。
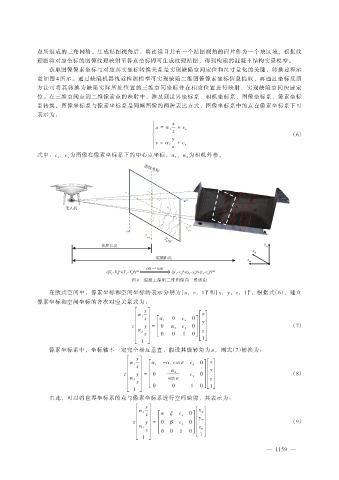
获取图像像素坐标与对应真实坐标转换关系是实现缺陷空间定位和尺寸量化的关键,转换过程示
意如图 4 所示。通过缺陷机器视觉检测模型可实现缺陷二维图像像素坐标信息提取,再通过坐标反演
方法可将其转换为缺陷实际所处位置的三维空间坐标并在相应位置进行映射,实现缺陷空间快速定
位。在三维空间点到二维像素点的映射中,涉及到世界坐标系、相机坐标系、图像坐标系、像素坐标
系转换。图像坐标系与像素坐标系是同幅图像的两种表达方式,图像坐标系中的点在像素坐标系下可
表示为:
ì x
ï ï z + c x
ï ïu = α 1
í (6)
ï ï y
ï ï v = α 2 z + c y
î
式中:c x 、c y 为图像在像素坐标系下的中心点坐标;α 1 、α 2 为相机外参。
图 4 混凝土缺陷二维图像向三维映射
在欧式空间中,像素坐标和空间坐标的表示分别为 [ u,v,1] 和 [ x,y,z,1] ,根据式(6),建立
T
T
像素坐标和空间坐标的齐次对应关系式为:
é ê x ù ú é ù x
ê ú
ê ê α 1 ú ú z ú ê ê é α 1 0 c x 0 ù ê ú
ê
ú ú ê ú y
ú ê ú
ê
z ê ê ú ú y = ê 0 α 2 c y 0 ú ê ú (7)
ú ú ê ú
z
ê ú
ê ê ê α 2 ú ú ú z ú ê ê ë 0 0 1 0û ê ú
ê
ë 1 û ë û 1
像素坐标系中,坐标轴不一定完全相互垂直,假设其旋转角为 ε,则式(7)转换为:
é ê x ù ú -α 1 cot ε 0 ù é ù x
ê ú
ê ê α 1 ú ú z ú ê ê éα 1 c x ú ú ê ú
ê
ê ú y
ú ú ê ú
z ê ê ú ú y = ê ê ê ê 0 α 2 c y 0 ê ú (8)
ú ú
ê ú
ú
z
ê ê ê α 2 ú ú z ú ê ê sin ε ú ú ê ú
ê ú
ê
ë 1 û ë 0 0 1 0û ë û 1
由此,可以将世界坐标系的点与像素坐标系进行空间映射,其表示为:
é ê x ù ú é ù
ê ú
x w
ê ê α 1 ú ú z ú éα ξ c x 0 ù ê ú
ê ê
ú ú ê ú
ê
ú ê ú
ê
y w
z ê ê ú ú y = ê0 β c y 0 ú ê ú (9)
ú
ê ê ê α 2 ú ú z ú ê ê ë0 0 1 0û ú ú ê ú
ê ú
ê ú
z w
ê
1
ë 1 û ë û
— 1159 —