
Page 57 - 2025年第56卷第9期
P. 57
均准确率、Dice 系数、精确率和召回率分别提 表 1 无人机图像采集和相机参数
高 了 7.01%、 8.57%、 9.26%、 4.95% 和 6.67%, 参数 数值
主 要 参 考 指 标 Dice 系 数 相 较 于 UNet3+ 、 S- 飞行时间 30 min
UNet3+ 和 CA-UNet3+ 网 络 提 高 了 9.26%、 最大速度 72 km/h
3.28%、2.68%,这表明本文所提方法可有效提 定位精度(RTK) 水平 1 cm,垂直 1.5 cm
高复杂背景下混凝土结构缺陷的分割精度和鲁 相机类型 1 英寸 CMOS
棒性。这主要是由于在网络每一个编码层中引 传感器尺寸 1 英寸
入的坐标注意力机制,增强模型对图像缺陷区 有效像素 2000 万像素
域的聚焦能力。此外,在模型编码层的最深处
最大图像尺寸 5472 × 3648
集成的分类引导模块有效降低了复杂背景干扰
视频分辨率 4K:3840×2160 @30p
时模型误判和过度分割的概率,提升模型多尺
镜头视角 84° FOV
度特征提取能力。
ISO 范围 100 ~ 3200(视频),100 ~ 1600(照片)
为进一步验证本文所提改进 UNet3+模型的
快门速度 8/2000 ~ 1/2000 s
[21] [22]
有 效 性 , 引 入 包 括 R2U-Net 、 SegNet 、
[23] [24]
DeepCrack 和 CSU-Net 经 典 检 测 算 法 进 行
对比试验。表 3 为不同网络之间评价指标对比
情 况 , 可 以 看 出 , 本 文 提 出 的 改 进 UNet3+模
型在各项指标上表现出色,尤其是在平均交并
比(0.8928)、 平 均 准 确 率(0.9265)和 Dice 系 数
(0.8826)方面,明显优于其他模型,表明其在
分割精度和一致性方面具备优势。该模型的准
确 率(0.9550)和 召 回 率(0.9135)也 高 于 其 他 对
比模型,显示了在正负样本分类的平衡性和整
体性能上的优势。这表明本文所提模型在水工
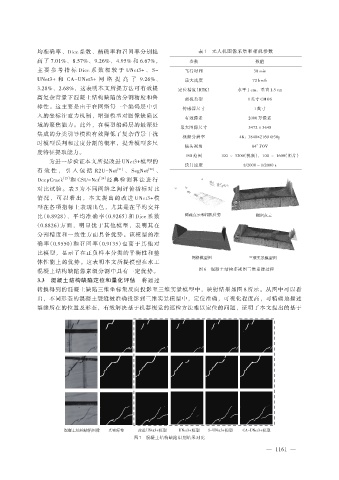
混凝土结构缺陷像素级分割中具有一定优势。 图 6 混凝土结构多视图三维重建过程
3.3 混凝土结构缺陷定位和量化评估 将通过
转换得到的混凝土缺陷三维坐标集反向投影至三维实景模型中,映射结果如图 8 所示。从图中可以看
出,不同形态的混凝土裂缝被准确投影到三维实景模型中,定位准确,可视化程度高,可精确地描述
裂缝所在的位置及形态,有效解决基于机器视觉的巡检方法难以定位的问题,证明了本文提出的基于
图 7 混凝土结构缺陷识别结果对比
— 1161 —