
Page 121 - 2025年第56卷第10期
P. 121
避免了人工标注数据依赖,减少了因标注质量问题导致的分割错误。此外,AGR-CrackNet 通过结合
符合裂缝形貌特征的损坏区域模拟和注意力引导机制,显著降低了因差异图二值化阈值选择不当或黑
色噪声引起的错误分割。综合评价指标 F 相比无监督方法分别提高了 66.8% 和 10.0%,相较于针对裂
1
缝分割设计的有监督算法 DeepCrack 提升了 3.7%。
由表 4 和图 10 可知,在 UnderwaterCrack 数据集上,AGR-CrackNet 相较两种无监督方法 F 指标分
1
别提升了 31.2% 和 26.4%。然而,与针对裂缝分割设计的有监督算法 DeepCrack 相比,AGR-CrackNet
的评价指标略低,但综合指标仍优于其他有监督分割算法。考虑到水下环境的复杂性以及有监督方法
对大量人工标注数据的依赖,AGR-CrackNet 在无需标注的情况下能实现较满意的分割效果,展现出
良好的检测性能和广阔的应用前景。
5 讨论
5.1 AGR-CrackNet 的局限性
(1)数据准备局限性。AGR-CrackNet 基于混凝土数据集进行网络训练,混凝土图像的准备是网络
训练的首要步骤,如图 6 所示的步骤 1。由于无人机或水下机器人采集的坝面图像,通常同时包含裂
缝图像和完好的混凝土图像。因此,在网络训练时,需要将完好的混凝土图像提前提取出来,以供
AGR-CrackNet 进行训练。值得注意的是,在水库大坝表面,裂缝区域通常仅占据很小的范围,完好
的混凝土图像则相对容易获取。此外,目前已开发出大量的图像分类网络 [34] ,基于这些预训练的裂
缝-背景图像分类模型,可以快速识别并筛选出非裂缝图像,从而简化数据准备的流程。
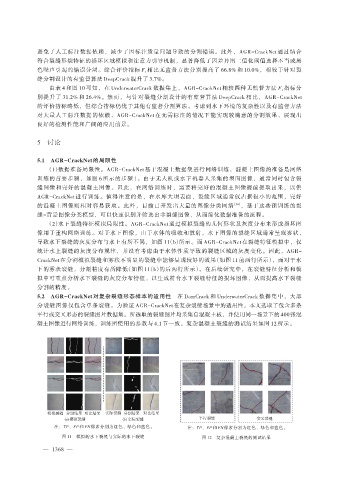
(2)水下裂缝特征模拟局限性。AGR-CrackNet 通过模拟裂缝的几何形状及灰度分布来形成损坏图
像用于重构网络训练。对于水下图像,由于水体的吸收和散射,水下图像的裂缝区域通常呈现雾状,
导致水下裂缝的灰度分布与水上有所不同,如图 11(b)所示。而 AGR-CrackNet 在裂缝特征模拟中,仅
统计水上裂缝的灰度分布规律,并没有考虑由于水体性质导致的裂缝区域的灰度变化。因此,AGR-
CrackNet 在分割模拟裂缝和雾状不明显的裂缝中能够呈现较好的效果(如图 11 前两行所示),而对于水
下的雾状裂缝,分割精度有所降低(如图 11(b)的后两行所示)。在后续研究中,在裂缝特征分析和模
拟中可重点分析水下裂缝的灰度分布特征,以生成符合水下裂缝特征的损坏图像,从而提高水下裂缝
分割的精度。
5.2 AGR-CrackNet 对复杂裂缝形态样本的适用性 在 DamCrack 和 UnderwaterCrack 数据集中,大部
分裂缝图像仅包含单条裂缝。为验证 AGR-CrackNet在复杂裂缝场景中的适用性,本文选取了包含多条
平行或交叉形态的裂缝图片数据集。所选取的裂缝图片均采集自混凝土板,并使用同一场景下的 400张混
凝土图像进行网络训练,训练所使用的参数与 4.1 节一致。复杂混凝土裂缝的测试结果如图 12 所示。
注:TP、FP 和 FN 像素分别为红色、绿色和蓝色。 注:TP、FP 和 FN 像素分别为红色、绿色和蓝色。
图 11 模拟的水下裂缝与实际的水下裂缝 图 12 复杂混凝土裂缝的测试结果
— 1368 —