
Page 139 - 2025年第56卷第10期
P. 139
ì ï ï1, ( pdx, qdy )在覆盖范围内
K θi = í (6)
ï ï0, ( pdx, qdy )不在覆盖范围内
î
检 测 区 域 修 正 后 的 单 角 度 像 素 值 I θi 可 由 下 式
计算:
I θi = K θi A θi, j (t r θi, j ) (7)
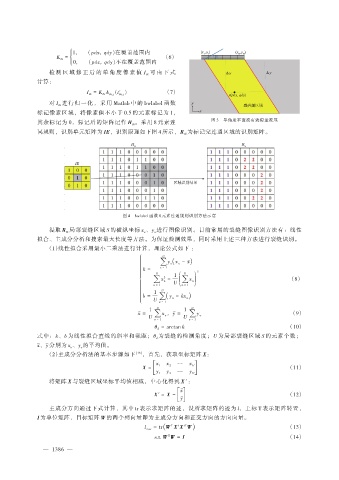
对 I θi 进行归一化,采用 Matlab 中的 bwlabel 函数
标记像素区域,将像素值不小于 0.5 的元素标记为 1,
其余标记为 0,标记后的矩阵记作 H θi 。采用 8 元素连 图 3 单角度平面波有效覆盖范围
同规则,识别单元矩阵为 IE,识别原理如下图 4 所示,R θi 为标记完连通区域的识别矩阵。
图 4 bwlabel 函数 8 元素连通规则识别方法示意
提取 R θi 局部裂缝区域 S 的横纵坐标 x 、y 进行图像识别。目前常用的裂缝图像识别方法有:线性
u
u
拟合、主成分分析和搜索最大长度等方法。为保证检测效果,同时采用上述三种方法进行裂缝识别。
(1)线性拟合采用最小二乘法进行计算,理论公式如下 :
ì U )
ï ï ∑ y u( x u - x ˉ
ï
ï
ï k = U u = 1 U( ) 2
ï
ï ï
U
í ∑ x u - 1 ∑ x u (8)
2
ï ï u = 1 u = 1
ï U
ï
ï 1 )
ï ï U u = 1
ïb = ∑( y u - kx u
î
U U
1 1
U U
x ˉ = ∑ x u , y ˉ = ∑ y u (9)
u = 1 u = 1
θ d = arctan k (10)
式中:k、b 为线性拟合直线的斜率和截距;θ 为裂缝的检测角度;U 为局部裂缝区域 S 的元素个数;
d
x、y 分别为 x 、y 的平均值。
u
u
(2)主成分分析法的基本步骤如下 [18] ,首先,获取坐标矩阵 X:
X = ê ê ê ê é x 1 x 2 … x U ù ú ú ú ú (11)
ë y 1 y 2 ⋯ y U û
将矩阵 X 与裂缝区域坐标平均值相减,中心化得到 X′:
ê ê ú
é ù x ˉ
X' = X - ê ú ú ú (12)
ê
ë û
y ˉ
主成分方向通过下式计算,其中 tr 表示求矩阵的迹,设所求矩阵的迹为 l,上标 T 表示矩阵转置,
I 为单位矩阵,目标矩阵 W 的两个列向量即为主成分方向和正交方向的方向向量。
l max = tr( W X'X' W) (13)
T
T
s.t. W W = I (14)
T
— 1386 —