
Page 49 - 2022年第53卷第1期
P. 49
和数值模拟技术,研究了空心梯形台人工鱼礁体布设间距对水动力特性的影响,发现双礁体的上升
流规模、阻力系数均与垂直水流方向布设间距成反比,上升流规模随平行水流方向布设间距成正
比。关长涛等 [23] 采用 RNG k-ε湍流模型和 SIMPLEC 数值模拟方法,分析了布设间距对三圆管型人工
鱼礁流场效应的影响,研究显示横向组合时布设间距等于礁体尺寸时获得的上升流和背涡流的规模
和强度最大;纵向组合方式时布设间距为礁体尺寸的 1.5 ~ 2.0 倍时流场效应最佳。刘洪生等 [17] 通过风
洞实验研究了正方体、金字塔及三棱柱人工鱼礁体在 4 种纵向布设间距条件下的水流场,发现当礁体
布设间距为 1 ~ 1.5 倍礁长时,流场效应差异显著。综上分析可见,目前前人对人工鱼礁布设间距的
研究大多集中在两单体礁之间,除了许联锋等 [24] 近年对渤海湾 M 型人工鱼礁区域流场分布特征及海
床泥沙起动特征进行过分析以外,对于单位鱼礁群等较大尺度下的布设间距的研究则比较少见,特
别是缺乏方形鱼礁群水动力学特性研究。同时,对不同人工鱼礁流场效应优劣的比较多停留在根据
实验现象或数值模拟结果进行相应描述,缺乏经过一定方法进行系统评价后得出优劣程度的结论。
为此,本研究应用粒子图像测速技术(Particle Image Velocimetry,PIV),通过水槽模拟实验,探
讨布设间距对方形生态礁单位礁流场及紊动效应的影响,采用熵值法对实验结果进行系统评价,以
期为单位鱼礁内间距的选取和鱼礁的合理布局提供参考。
2 水槽模拟实验概况
本实验在北京师范大学环境学院水沙科学教育部重点实验室的多功能循环水槽中进行。以辽东
湾人工鱼礁建设区为背景,基于拟投放的典型人工鱼礁单位礁原型进行合理比尺缩放,采用 PIV 技术
进行人工鱼礁水槽模拟实验,探讨方形多功能复合型生态礁(以下简称为方形生态礁)在不同流速条
件下及不同单位鱼礁内间距的水动力学特性,并以此为基础进行格局优化。
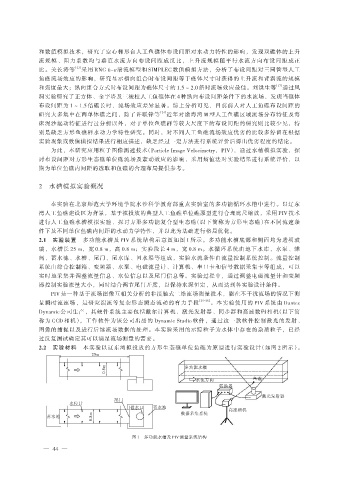
2.1 实验装置 多功能水槽及 PIV 系统结构示意图如图 1 所示。多功能水槽底部和侧面均为透明玻
璃,水槽长 25 m,宽 0.8 m,高 0.8 m;实验段长 4 m,宽 0.8 m。水循环系统由地下水库、水泵、蝶
阀、蓄水池、水槽、尾门、尾水库、回水渠等组成,实验水流条件由流量控制系统控制。流量控制
系统由综合控制箱、变频器、水泵、电磁流量计、计算机、串口卡和信号数据采集卡等组成,可以
实时地采集并调整流量信息、水位信息以及尾门信息等。实验过程中,通过调整电磁流量计和变频
器控制实验流量大小,同时结合调节尾门开度,以保持水深恒定,从而达到各实验设计条件。
PIV 是一种基于流场图像互相关分析的非接触式二维流场测量技术,能在不干扰流场的情况下测
量瞬时流速场,是研究湍流等复杂形态瞬态流动的有力手段 [25-26] 。本实验使用的 PIV 系统由 Dantec
Dynamic 公司生产,其硬件系统主要包括戴尔计算机、激光发射器、同步器和高速数码相机(以下简
称为 CCD 相机),工作软件为该公司出品的 Dynamic Studio 软件,通过这一款软件控制激光的发射、
图像的捕捉以及进行后续流场数据的处理。本实验采用的示踪粒子为水体中存在的杂质粒子,已经
过反复测试确定其可以满足流场测量的需要。
2.2 实验材料 本实验以辽东湾拟投放的方形生态礁单位鱼礁为原型进行实验设计(如图 2 所示)。
25m
0.8m 多功能水槽
水流方向 鱼礁
转换器
激光发射器
尾门
水位计
排水口 蓄水池 高速相机
0.8m
蓄水池 数据采集系统
图 1 多功能水槽及 PIV 测量系统结构
— 44 —