
Page 62 - 2022年第53卷第10期
P. 62
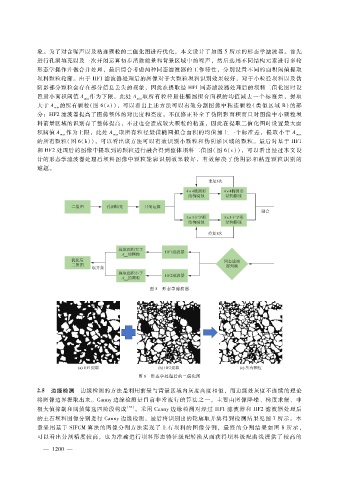
象。为了对含噪声以及粘连颗粒的二值化图进行优化,本文设计了如图 5所示的形态学滤波器。首先
进行孔洞填充以及一次开闭运算初步消除前景和背景区域中的噪声,然后选用不同结构元素进行多轮
形态学操作并做合并处理,最后综合考虑两种同态滤波器的工作特性,分别设置不同的面积阈值提取
坝料颗粒轮廓。由于 HF1滤波器处理后的图像对于大颗粒坝料识别效果较好,对于小粒径坝料以及伪
阴影部分颗粒会存在部分信息丢失的现象,因此在提取经 HF1同态滤波器处理后的坝料二值化图时设
置最小面积阈值 A 作为下限,此处 A 取所有粒径最佳椭圆拟合面积的均值减去一个标准差,提取
min
min
大于 A 的所有颗粒(图 6(a)),可以看出上述方法可以有效分割图像中粘连颗粒(类似区域 B)的部
min
分;HF2滤波器提高了图像整体的对比度和亮度,不仅修正补全了伪阴影面积而且对图像中小颗粒坝
料前景区域的识别有了整体提高,不过也会造成较大颗粒的粘连,因此在提取二值化图时设置最大面
积阈值 A 作为上限,此处 A 取所有粒径最佳椭圆拟合面积的均值加上一个标准差,提取小于 A max
max
max
的所有颗粒(图 6(b)),可以看出该方法可以有效识别小颗粒和伪阴影区域的颗粒。最后对基于 HF1
和 HF2处理后的图像中提取到的颗粒进行融合得到整体坝料二值图(图 6(c)),可以看出经过本文设
计的形态学滤波器处理后坝料图像中颗粒轮廓识别效果较好,有效解决了伪阴影和粘连颗粒识别的
难题。
图 5 形态学滤波器
图 6 形态学处理后的二值化图
2.5 边缘检测 边缘检测的方法是利用前景与背景区域内灰度高度相似,而边缘处灰度不连续的理论
将图像边界提取出来。Canny边缘检测是目前非常流行的算法之一,主要由图像降噪、梯度求解、非
极大值抑制和阈值筛选四阶段构成 [33] 。采用 Canny边缘检测对经过 HF1滤波器和 HF2滤波器处理后
的土石坝料图像分别进行 Canny边缘检测,最后将识别出的轮廓取并集得到检测结果见图 7所示。本
章采用基于 SIFCM算法的图像分割方法实现了土石坝料的图像分割,最终的分割结果如图 8所示,
可以看出分割精度较高,也为准确进行坝料形态特征级配转换从而获得坝料级配曲线提供了较高的
0
— 1 2 0 —