
Page 123 - 2023年第54卷第6期
P. 123
而 RBF神经网络会不可避免地出现非最优权 重 等 问 题 [14] 。 本 文 将 三 个 参 数 作 为 粒 子 群 算 法
的优化目标,将三者视为自由运动的粒子,在 N维 空 间 中 初 始 化 粒 子 的 速 度、 位 置 等 算 法 参 数,
带入适应度函数计算粒子适应度 f,将网络的均方 误 差 式 (6)作 为 适 应 度 函 数 取 最 小 值 为 最 优 适
i
应度
1 1 T 1 Z
2
minF(x) = [ ∑ (s-y ) + ∑ (S -Y) 2 ] (6)
i
l
l
i
2 T i =1 Z l =1
式中:T、Z为训练、测试样本数;s、S为实际地震动输出;y、Y为预期地震动输出。
i
l
i
l
模型训练过程中通过不断迭代更新粒子及群体的极值 p、g来更新粒子位置 x,迭代公式为
i i i
(k)
(k + 1)
x (k + 1) = x + v (7)
i
i
i
(k)
(k)
(k)
(k)
(k)
(k + 1 )
v = ω v + cr(p - x ) + cr(g - x ) (8)
i
i
2 2
1 1
i
i
i
i
式中:k为迭代次数;ω为权值;c为加速度常数;r为[0,1]内的随机数。
2.3 云理论 优 化 (CPSO- RBF) 粒 子 群 算 法 会 陷 入 非 要 求 的 局 部 极 值,且 存 在 收 敛 速 度 慢 等 问
题 [15] 。为此,本文引入云理论(CloudTheory) [16 - 17] ,对陷入局部极值的粒子进行变异操作。首先给定
参数距离 D和代数 G,若粒子在 G代没有位置变化,或变化值小于 D时,就判定其陷入局部极值;定
义三个云数字特征对粒子进行变异,将全局极值 G 作为期望 E;熵 E为粒子变异的搜索域,将其设
best x n
置为 3G ;超熵 H为云散度,为了保证算法的鲁棒性,不宜过大或过小,令 H = E?10以保证算法的
best
n
e
e
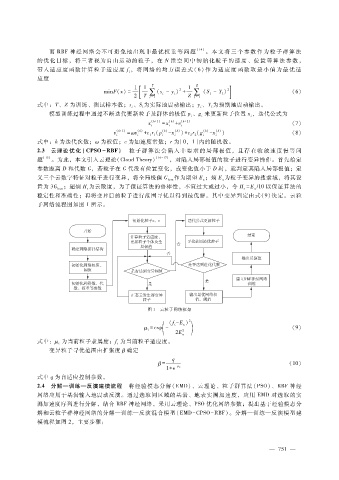
稳定性和准确性;再将变异后的粒子进行范围寻优以得到最优解。其中变异判定由式(9)决定。云粒
子网络流程图如图 1所示。
图 1 云粒子网络框架
( (f - E) 2
2 )
i
x
= exp- (9)
μ i 2E n
为当前粒子隶属度;f为当前粒子适应度。
式中:μ i
i
变异粒子寻优范围由扩张度 β 确定
q
β = (10)
1 + e
- μ i
式中 q为自适应控制参数。
2.4 分解—训练—反演建模流程 将经验模态分解(EMD)、云理论、粒子群算法(PSO)、RBF神经
网络应用于基岩输入地震动反演。通过选取同区域的基岩、地表实测加速度,应用 EMD对选取的实
测加速度序列进行分解,结合 RBF神经网络,采用云理论、PSO优化网络参数;提出基于经验模态分
解和云粒子群神经网络的分解—训练—反演混合模型(EMD - CPSO - RBF)。分解—训练—反演模型建
模流程如图 2,主要步骤:
— 7 5 1 —