
Page 111 - 2024年第55卷第9期
P. 111
误差控制在 0.02mm以内;持续光照条件下识别精度最佳,误差控制在 0.01mm左右;两项实验的总
体误差控制在 0.05mm以内,证明方法稳定,能够满足工程应用需要。
5 闸坝工程应用
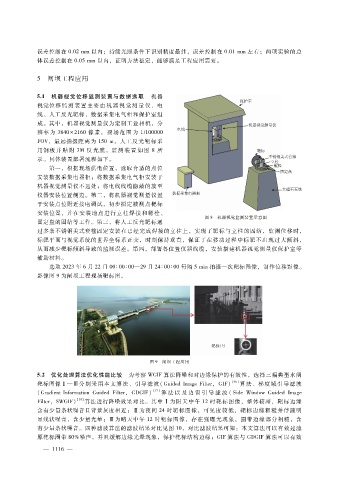
5.1 机器视觉位移监测装置与数据选取 机器
视觉位移 监 测装 置主 要 由 机 器 视 觉 测 量 仪、电
线、人工反光靶标、数据采集电气柜和保护室组
成。其中,机器视觉测量仪为定制工业相机,分
辨率 为 3840 × 2160像 素,视 场 范 围 为 1?100000
FOV ,最远拍摄距离为 150m,人工反光靶标采
用钢 板 并 贴 附 3M 反 光 膜。监 测 装 置 如 图 8所
示。具体装置部署流程如下。
第一,根据现场供电位置,选取合适的点位
安装数据采集电器柜;将数据采集电气柜安装于
机器视觉测量仪不远处;将电线线缆隐蔽的放至
仪器安装位置侧边。第二,将机器视觉测量仪置
于安装点位附近接电调试,初步拟定被测点靶标
安装位置,并在安装地点进行立柱焊接和螺栓、
图 8 机器视觉监测装置示意图
固定盘的固结等工作。第三,将人工反光靶标通
过多条不锈钢美式套箍固定安装在已经完成焊接的立柱上,实现了靶标与立柱的固结,监测位移时,
标靶平面与视觉系统的世界坐标系正交,时刻保持垂直,保证了在移动过程中标靶不出现过大倾斜,
从而减少靶标倾斜导致的监测误差。第四,部署各位置仪器线缆,安装搭建机器视觉测量仪保护室等
辅助材料。
选取 2023年 6月 22日 00∶00∶00—29日 24∶00∶00每隔 5min拍摄一次靶标图像,制作位移影像。
影像图 9为闸坝工程现场靶标图。
图 9 闸坝工程应用
5.2 优化处理算法优化性能比较 为考察 WGIF算法降噪和对边缘保护的有效性,选择三幅典型水闸
靶标图像Ⅰ—Ⅲ分别采用本文算法、引导滤波(GuidedImageFilter,GIF) [36] 算法、梯度域引导滤波
( GradientInformationGuidedFilter, GDGIF) [37] 算 法 以 及 边 窗 引 导 滤 波 (SideWindow GuidedImage
Filter ,SWGIF) [38] 算法进行降噪效果对比。其中Ⅰ为阴天中午 12时靶标图像,整体较暗,靶标边缘
含有少量条状噪音且背景灰度相近;Ⅱ为夜间 24时靶标图像,可见度较低,靶标边缘粗糙并伴随明
显线状噪音,含少量光晕;Ⅲ为晴天中午 12时靶标图像,存在强曝光现象,圈带边缘部分粗糙,含
有少量条状噪音。四种滤波算法的滤波结果对比见图 10,对比滤波结果可知:本文算法可以有效过滤
原靶标圈带 80%噪声,并且缓解边缘光晕现象,保护靶标结构边缘;GIF算法与 GDGIF算法可以有效
— 1 1 6 —
1