
Page 106 - 2024年第55卷第9期
P. 106
次的位移信息采集,且在垂直方向的监测精度不足 [20] 。全站仪具有距离测量、角度测量、坐标测量以
及高程测量等多种功能,在地理测量、工程测绘和建筑监测等领域应用广泛 [15 - 16,21] 。然而,在实际闸
坝位移监测中,不仅使用成本高,还可能受到测量点不可见和操作复杂性的制约。
随着建筑结构监测技术不断发展,诸如 Harris角检测法 [22] 、LK光流匹配算法 [23] 、模板匹配算
法 [24] 等视觉监测技术已被广泛应用于结构位移测量与动态特性分析。Yoon等 [23] 将 Harris角检测法与
LK光流匹配算法结合,获取建筑结构的位移响应与动力特性;Brownjohn等 [25] 在英国亨伯桥上测试了
基于计算机视觉的位移监测系统,拓展了商业监测领域的应用;Bocian等 [26] 基于模板匹配和 LK稀疏
光流算法提取了斜拉桥的模态阻尼和频率,以此分析斜拉桥的动态响应;Kohut等 [27] 基于数字图像相
关实现结构平面挠度测量,为结构变形分析提供了更为直观的指标。在算法改进方面,Wu等 [28] 根据
跃迁计算改进模板匹配算法,取得了提升目标追踪速度的显著效果,为实时监测提供了更高的效率;
Molina - Viedma等 [29] 将相位运动放大和数字图像技术 [30] 相结合对悬臂梁的模态振型进行了识别,弥补
了数字图像技 术 对 结 构 高 频 振 动 位 移 识 别 精 度 低 的 缺 陷;Khuc等 [22] 通 过 优 化 Harris角 点 并 结 合
FREAK描述子,实现了亚像素级别的匹配,拓展了特征点提取与匹配的应用范围;此外,Guo等 [31]
根据投影校正技术计算变换的投影和仿射分量,实现了建筑结构地震位移测量,为结构在极端环境下
的监测提供了可行性和精确性。虽然当前视觉监测技术在建筑结构位移测量领域取得了显著的进展,
但对于应力水平更高、运行状况更为复杂、安全隐患更多的闸坝结构,一直由于监测图像数据较少,
仍未见到基于机器视觉的闸坝结构变形监测的系统分析。
综上,为克服传统闸坝位移监测方法精度不足、安装空间受限以及难以实现远距离长期稳定的位
移监测等问题,提出一种基于机器视觉的闸坝表面位移非接触式高精度智能监测方法。采用人工靶标
作为标志物,以摄像机作为采集设备,通过无线传输图像信息,之后,利用加权分布的自适应伽马修
正( AdaptiveGammaCorrectionWeightedDistribution,AGCWD)充分还原图像特征与细节,增强低照度
图像与光照不均图像特征的表达能力;引入边缘感知权重因子加权引导滤波( WeightedGuidedImage
Filter ,WGIF)基于图像结构边缘梯度信息对背景噪音进行滤波降噪,保护靶标图像边缘细节;并结合
基于贝叶斯框架的时空上下文信息( Spatio - TemporalContext,STC) [32] 算法与曲面拟合技术,揭示闸坝
靶标图像序列间的复杂非线性关系,提取靶标亚像素级位移,进而实现更为灵活便捷的、高质量、高
精度闸坝表面位移安全智能化监测 [33 - 34] 。
2 研究框架
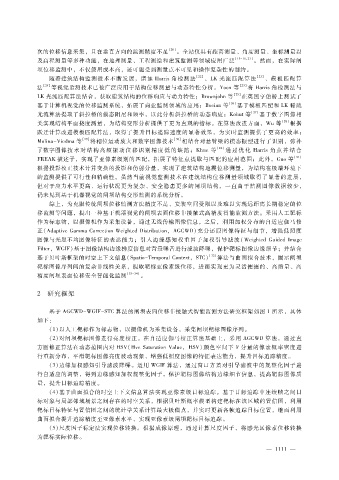
基于 AGCWD - WGIF - STC算法的闸坝表面位移非接触式智能监测方法研究框架如图 1所示,具体
如下:
(1)以人工靶标作为标志物,以摄像机为采集设备,采集闸坝靶标图像序列。
( 2)对闸坝靶标图像进行亮度校正。在自适应伽马校正算法基础上,采用 AGCWD算法,通过直
方图修正算法在动态范围内对 HSV(HveSaturationValue,HSV)颜色空间下 V分量的像素概率密度进
行重新分布,平滑靶标图像亮度波动现象,增强低照度图像的特征表达能力,提升目标追踪精度。
( 3)边缘加权感知引导滤波降噪。运用 WGIF算法,通过窗口方差对引导滤波中的规整化因子进
行自适应的调整,得到边缘感知加权规整化因子,保护靶标图像结构边缘细节信息,提高靶标图像质
量,提升目标追踪精度。
(4)基于曲面拟合的时空上下文信息算法实现亚像素级目标追踪。基于目标追踪中连续帧之间目
标对象与局部邻域场景之间存在的时空关系,根据贝叶斯概率模型构建靶标在该区域的置信图,利用
靶标目标特征与置信图之间的统计学关系计算最大极值点,并实时更新各帧追踪目标位置,继而利用
曲面拟合提升追踪精度至亚像素水平,实现亚像素级闸坝靶标目标追踪。
(5)尺度因子标定法实现位移转换。根据成像原理,通过计算尺度因子,将感光区像素位移转换
为靶标实际位移。
1
— 1 1 1 —