
Page 109 - 2024年第55卷第9期
P. 109
频域乘积运算,提升运算效率。然后,采用傅里叶逆变换(inversefastFouriertransform,IFFT),可得
空间上下文模型函数的求解式:
SC
c(x,y) =h (x,y) (I(x,y) ω( (x ,y ) - (x,y) )) (13)
α
SC
(c(x,y)) = (h (x,y)) ⊙ (I(x,y) ω ( (x ,y ) - (x,y) )) (14)
σ
(m(x,y))
SC
h (x,y) = - 1 ( (I(x,y) ω ( (x ,y ) - (x,y) )) ) (15)
σ
式中:为卷积运算符号; 为快速傅里叶变换;⊙为对应位置的乘积; - 1 为快速傅里叶逆变换。
3.3.2 靶标区域目标追踪 STC算法通过动态搜索目标图像的置信度函数最大值,实现目标对象的定
SC
位追踪。在第 t帧照片中,通过式(15)计算当前帧的时空上下文模型 h (x),根据下式更新下一帧图
t
STC
像的时空上下文模型 H (x),更新第 t + 1 帧的置信度函数为 c (x),主要基于下式:
t + 1 t + 1
STC
STC
SC
H (x) =(1 - ρ )H (x) + ρ h (x) (16)
t + 1 t t
STC
- 1
c (x) =F (F(H (x)) ⊙ (I (x) ω (x - x )) (17)
t
t + 1
t + 1
α t
STC
式中:ρ 为学习速率因子;H (x)为前一帧图像的时空上下文模型与空间上下文模型的加权和,可有
t
效应对目标表面外观强度突变引起的噪声干扰,继而根据搜索置信度函数最大值,确定第 t + 1帧图像
的目标位置。为使目标追踪结果更加稳健,在 STC算法运行过程中依据文献[32]取值为 α = 2.25,β =
1 ,ρ = 0 .075,s = 1 。
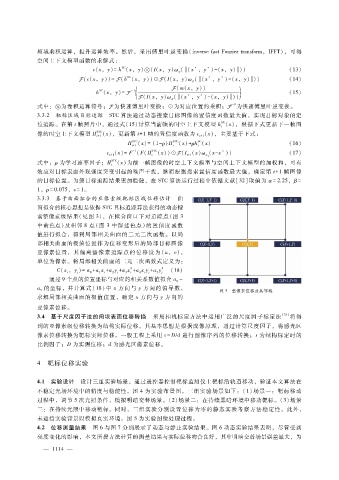
3.3.3 基于曲面拟合的亚像素级靶标区域位移估计 曲
面拟合的核心思想是依据 STC目标追踪算法获得的动态搜
索整像素级结果(见图 3),在拟合窗口下对追踪点(图 3
中黄色点)及相邻 8点(图 3中深蓝色点)的置信度函数
值进行拟合,得到局部相关曲面的二元二次函数。以局
部相关曲面的极值位置作为位移变形后的局部目标图像
亚像素位置,其偏离整像素追踪点的位移设为 ( u,v),
单位为像素。将局部相关曲面的二元二次函数式定义为:
2
2
C(x,y) =a+ ax + ay + ax+ axy + ay (18)
5 j
4 i j
0
j
i
3 i
2 j
1 i
通过 9个点的位置坐标与对应的相关系数值拟合 a~
0
a 的坐标,并计算式(18)中 x方向与 y方向的偏导数,
5 图 3 整像素位移及其邻域
求解局部相关曲面的极值位置,确定 x方向与 y方向的
亚像素位移。
3.4 基于尺度因子法的闸坝表面位移转换 采用相机标定方法中运用广泛的尺度因子标定法 [35] 将得
到的亚像素级位移转换为结构实际位移。其基本思想是根据成像原理,通过计算尺度因子,将感光区
像素位移转换为靶标实际位移。一般工程上采用 s = D?d进行图像序列的位移转换;s为结构标定时的
比例因子;D为实测位移;d为感光区像素位移。
4 靶标位移实验
4.1 实验设计 设计三组实验场景,通过遥控器控制靶标监测仪上靶标沿轨道移动,验证本文算法在
不稳定光场环境中的精度与稳健性。图 4为实验布置图。三组实验场景如下:(1)场景一:靶标移动
过程中,调节 5次光照条件,模拟明暗交替场景。(2)场景二:在持续黑暗环境中移动靶标。(3)场景
三:在持续光照中移动靶标。同时,三组实验分别设置位移为零的静态实验考察方法稳定性。此外,
未遮挡实验背景以模拟真实环境。图 5为实验图像处理过程。
4.2 位移测量结果 图 6与图 7分别展示了动态与静止实验结果。图 6动态实验结果表明,尽管受到
亮度变化的影响,本文所提方法计算的测量结果与实际位移吻合良好,其中明暗交替场景误差最大,为
1
— 1 1 4 —