
Page 114 - 2024年第55卷第9期
P. 114
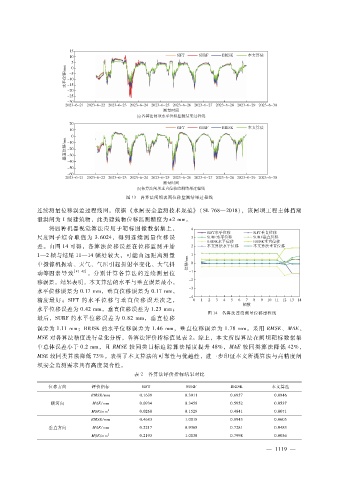
图 13 各算法闸坝表面位移监测结果过程线
连续测量位移误差过程线图。依据 《水闸安全监测技术规范》 (SL768—2018),该闸坝工程主体挡潮
泄洪闸为 1级建筑物,此类建筑物位移监测精度为±2mm。
将四种机器视觉算法应用于靶标图像数据集上,
尺度因子 综 合 取 值为 3.6024,得到 连 续 测 量 位 移 误
差。由图 14可得,各算法位移误差在位移监测开始
1—2帧与结尾 11—14帧处较大,可能由远距离测量
中摄像机振动、天气、气压引起折射率变化、大气抖
动等因素导致 [41 - 42] 。分别计算各算法的连续测 量位
移误差,结果表明,本文算法的水平与垂直误差最小,
水平位移误差为 0.17mm,垂直位移误差为 0.17mm,
精度最 好;SIFT的 水 平 位 移 与 垂 直 位 移 误 差 次 之,
水平位移误差为 0.42mm,垂直位移误差为 1.23mm;
图 14 各算法连续测量位移过程线
最后,SURF的水平位移误差为 0.82mm,垂直位移
误差为 1.11mm;BRISK的水平位移误差为 1.46mm,垂直位移误差为 1.78mm。采用 RMSE、MAE、
MSE对各算法精度进行量化分析,各算法评价指标值见表 2。综上,本文所提算法在闸坝靶标数据集
中总体误差小于 0.2mm,且 RMSE较同类目标追踪算法精度提升 48%,MAE较同类算法降低 42%,
MSE较同类算法降低 73%。表明了本文算法的可靠性与优越性,进一步印证本文所提算法与高精度闸
坝安全监测需求具有高度契合性。
表 2 各算法评价指标结果对比
位移方向 评价指标 SIFT SURF BRISK 本文算法
RMSE?mm 0.1639 0.3911 0.6957 0.0846
顺河向 MAE?mm 0.0934 0.3458 0.5952 0.0537
MSE?mm 2 0.0268 0.1529 0.4841 0.0071
RMSE?mm 0.4683 1.0018 0.8943 0.0605
垂直方向 MAE?mm 0.2217 0.9368 0.7281 0.0483
MSE?mm 2 0.2193 1.0038 0.7998 0.0036
1
— 1 1 9 —