
Page 147 - 2024年第55卷第11期
P. 147
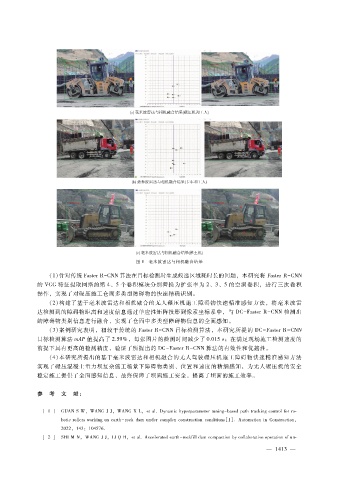
图 8 毫米波雷达与相机融合结果
(1)针对传统 FasterR - CNN算法在目标检测时生成候选区域耗时长的问题,本研究将 FasterR - CNN
的 VGG特征提取网络的第 4、5个卷积模块分别替换为扩张率为 2、3、5的空洞卷积,进行三次卷积
操作,实现了对碾压施工仓面多类型障碍物的快速精确识别。
( 2)构建了基于毫米波雷达和相机融合的无人碾压机施工障碍物快速精准感知方法,将毫米波雷
达检测到的障碍物距离和速度信息通过单应性矩阵投影到像素坐标系中,与 DC - FasterR - CNN检测出
的障碍物类别信息进行融合,实现了仓面中多类型障碍物信息的全面感知。
( 3)案例研究表明,相较于传统的 FasterR - CNN目标检测算法,本研究所提的 DC - FasterR - CNN
目标检测算法 mAP值提高了 2.59%,每张图片的检测时间减少了 0.015s;在满足现场施工检测速度的
前提下具有更高的检测精度,验证了所提出的 DC - FasterR - CNN算法的有效性和优越性。
( 4)本研究所提出的基于毫米波雷达和相机融合的无人驾驶碾压机施工障碍物快速精准感知方法
实现了碾压混凝土重力坝复杂施工场景下障碍物类别、位置和速度的精细感知,为无人碾压机的安全
稳定施工提供了全面感知信息,最终保障了坝面施工安全,提高了坝面的施工效率。
参 考 文 献:
[ 1] GUANSW,WANGJJ,WANGXL,etal.Dynamichyperparametertuning - basedpathtrackingcontrolforro
boticrollersworkingonearth - rockdam undercomplexconstructionconditions[J].AutomationinConstruction,
2022,143:104576.
[ 2] SHIM N,WANGJJ,LIQH,etal.Acceleratedearth - rockfilldamcompactionbycollaborativeoperationofun
4
— 1 1 3 —