
Page 144 - 2024年第55卷第11期
P. 144
从表 1可以看出,对比目标检测精度,改进后的 DC - FasterR - CNN的平均精度值 mAP为 72.9,
高于 FasterR - CNN的 70.3和 YOLO的 64.7,具有更高的目标检测精度。对比检测速度,DC - FasterR -
CNN的目标检测速度为 0.155s?张,较改进前 FasterR - CNN的 0.170s?张快,但较 YOLO目标检测算
法的 0.061s?张慢。然而就现场实际情况而言,碾压混凝土坝无人碾压机的控制指令每 0.2s发送一
次,DC - FasterR - CNN的目标检测速度足以满足无人碾压机的目标检测需求。综上,DC - FasterR -
CNN目标检测算法更适合碾压混凝土坝坝面施工障碍物的快速准确检测。
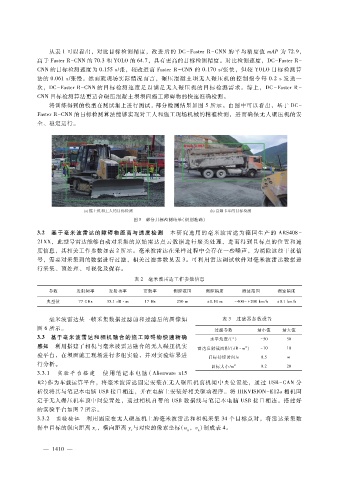
将训练得到的模型在测试集上进行测试,部分检测结果如图 5所示。由图中可以看出,基于 DC -
FasterR - CNN的目标检测算法能够实现对工人和施工现场机械的精准检测,进而确保无人碾压机的安
全、稳定运行。
图 5 部分目标检测结果(识别准确)
3.2 基于毫米波雷达的障碍物距离与速度检测 本研究选用的毫米波雷达为德国生产的 ARS408 -
21XX ,此型号雷达能够自动对采集的原始雷达点云数据进行聚类处理,进而得到目标点的位置和速
度信息,其相关工作参数如表 2所示。毫米波雷达在采样过程中会存在一些噪声,为消除这些干扰信
号,需要对采集到的数据进行过滤,相关过滤参数见表 3。可利用雷达调试软件对毫米波雷达数据进
行采集、预处理、可视化及保存。
表 2 毫米波雷达工作参数信息
参数 发射频率 发射功率 更新率 测距范围 测距精度 测速范围 测速精度
典型值 77GHz 35.1dB·m 17Hz 250m ±0.10m - 400~ + 200km?h ±0.1km?h
毫米波雷达某一帧采集数据过滤前和过滤后的图像如 表 3 过滤器参数设置
图 6所示。
过滤参数 最小值 最大值
3.3 基于毫米波雷达和相机融合的施工障碍物快速精确
水平角度?(°) - 50 50
感知 利用搭建了相机与毫米波雷达融合的无人碾压机实 2
雷达反射截面积?(dB·m ) - 10 10
验平台,在坝面施工现场进行多组实验,并对实验结果进 目标持续时间?s 0.5 ∞
行分析。 2
目标大小?m 0.2 20
3.3.1 实 验 平 台 搭 建 使 用 笔 记 本 电 脑 (Alienwarex15
R2)作为车载运算平台,将毫米波雷达固定安装在无人碾压机前机架中央位置处,通过 USB - CAN分
析仪将其与笔记本电脑 USB接口相连,并在电脑上安装好相关驱动程序。将 HIKVISION - E12a相机固
定于无人碾压机车顶中间位置处,通过相机自带的 USB数据线与笔记本电脑 USB接口相连。搭建好
的实验平台如图 7所示。
3.3.2 实验验证 利用固定在无人碾压机上的毫米波雷达和相机采集 34个目标点对,将雷达采集数
据中目标的纵向距离 x,横向距离 y与对应的像素坐标(u,v)制成表 4。
g
r
r
g
— 1 4 0 —
1