
Page 84 - 2025年第56卷第10期
P. 84
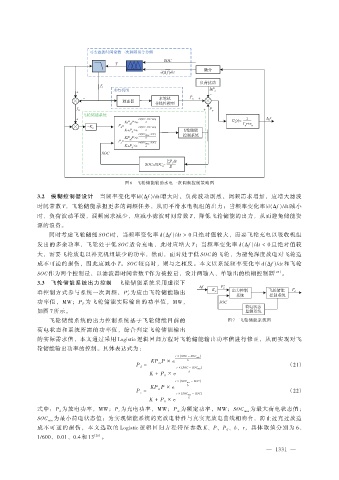
图 6 飞轮储能辅助水电一次调频控制策略图
3.2 模糊控制器设计 当频率变化率|d(Δf )/dt|增大时,负荷波动剧烈,调频需求增加,应增大滤波
时间常数 T,飞轮储能承担更多的调频任务,从而平滑水电机组的出力;当频率变化率|d(Δf )/dt|减小
时,负荷波动平缓,调频需求减少,应减小滤波时间常数 T,降低飞轮储能的出力,从而避免储能资
源的浪费。
同时考虑飞轮储能 SOC 时,当频率变化率 d(Δf )/dt > 0 且绝对值较大,需要飞轮充电以吸收机组
发出的多余功率,飞轮处于低 SOC 适合充电,此时应增大 T;当频率变化率 d(Δf )/dt < 0 且绝对值较
大,需要飞轮放电以补充机组缺少的功率,然而,面对处于低 SOC 的飞轮,为避免深度放电对飞轮造
成不可逆的损伤,因此应减小 T。SOC 较高时,则与之相反。本文以系统频率变化率 d(Δf )/dt 和飞轮
SOC 作为两个控制量,以滤波器时间常数 T 作为被控量,设计两输入、单输出的模糊控制器 [25] 。
3.3 飞轮储能系统出力控制 飞轮储能系统采用虚拟下
垂控制方式参与系统一次调频,P′ F 为应由飞轮储能输出
功率值,MW;P F 为飞轮储能实际输出的功率值,MW,
如图 7 所示。
飞轮储能系统的出力控制系统基于飞轮储能目前的 图 7 飞轮储能系统图
荷电状态和系统所需的功率值,综合判定飞轮储能输出
的实际需求值,本文通过采用 Logistic 逻辑回归方程对飞轮储能输出功率值进行修正,从而实现对飞
轮储能输出功率的控制。具体表达式为:
r × (SOC - SOC min )
b
KP m P × e
P d = (21)
r × (SOC - SOC min )
b
K + P 0 × e
r × (SOC max - SOC )
b
KP m P × e
P c = (22)
r × (SOC max - SOC )
b
K + P 0 × e
式中:P d 为放电功率,MW;P c 为充电功率,MW;P m 为额定功率,MW;SOC max 为最大荷电状态值;
SOC min 为最小荷电状态值;为实现储能系统的充放电特性与真实充放电曲线相吻合,防止过充过放造
成不可逆的损伤,本文选取的 Logistic 逻辑回归方程特征参数 K、P、P 0 、b、r,具体取值分别为 6、
[26]
1/600、0.01、0.4 和 13 。
— 1331 —