
Page 81 - 水利学报2021年第52卷第2期
P. 81
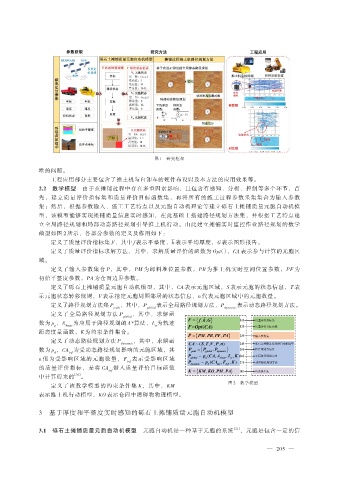
图 1 研究框架
堆的问题。
工程应用部分主要包含了推土机与自卸车的硬件布设以及本方法的应用效果等。
2.2 数学模型 由于在摊铺过程中存在多重因素影响,且包含有感知、分析、控制等多个环节,首
先,建立质量评价指标集和质量评价目标函数集,再将所有的施工过程参数采集集合为输入参数
集;然后,根据参数输入、施工工艺特点以及元胞自动机理论等建立砾石土摊铺质量元胞自动机模
型,该模型能够实现摊铺质量信息实时感知,在此基础上搭建路径规划方法集,并根据工艺特点建
立全局路径规划和局部动态路径规划引导推土机行动。由此建立摊铺实时监控作业路径规划的数学
模型如图 2 所示,各部分参数的定义及作用如下:
定义了质量评价指标集 F,其中 f 表示平整度,h 表示平均厚度,G 表示图形报告。
定义了质量评价指标求解方法,其中,求解质量评价的函数为 Opt(),CA 表示参与计算的元胞区
域。
定义了输入参数集合 P,其中,PM 为卸料堆位置参数,PB 为推土机实时空间位置参数,PF 为
初始平整度参数,PA 为仓面边界参数。
定义了砾石土摊铺质量元胞自动机模型,其中,CA 表示元胞区域,S 表示元胞的状态信息,T 表
示元胞状态转移规则,V 表示指定元胞周围邻居的状态信息,n 代表元胞区域中的元胞数量。
定义了路径规划方法集 P path ,其中,P global 表示全局路径规划方法,P dynamic 表示动态路径规划方法。
定义了全局路径规划方法 P global ,其中,求解函
数为 p ,A Astar 为应用于路径规划的 A*算法,L 为轨迹
g
α
距离度量函数,K 为约束条件集合。
定义了动态路径规划方法 P dynamic ,其中,求解函
数为 p ,CA 为受动态路径规划影响的元胞区域,其
inf
d
n 值为受影响区域的元胞数量,F 表示受影响区域
inf
的质量评价指标,是将 CA 带入质量评价目标函数
inf
中计算得来的 [20] 。
定义了该数学模型的约束条件集 K,其中,KM 图 2 数学模型
表示推土机行动模型,KO 表示仓面中障碍物物理模型。
3 基于厚度和平整度实时感知的砾石土摊铺质量元胞自动机模型
3.1 砾石土摊铺质量元胞自动机模型 元胞自动机是一种基于元胞的系统 [21] ,元胞是包含一定的信
— 205 —