
Page 84 - 水利学报2021年第52卷第2期
P. 84
利用 GPS+RTK 技术,在推土机上安装监控终端,通过接收北斗,GPS,GLONASS 等卫星定位系
统的信号,与差分基站传回的差分定位数据耦合解算得到推土机的实时空间位置数据,此定位信息
误差在 2 cm 以内,能够满足摊铺工艺管控的需求 [25] 。此数据可用以下集合表示:
D ttj ={x,y,H,v,t } (5)
式中:D 为推土机实时空间位置数据;x 为经度;y 为纬度;H 为高程,m;v 为推土机的瞬时速度,
ttj
m/s;t 为获取到定位的时间,s。
在自卸车上安装北斗定位装置以及卸料传感器等,可以感知到卸料过程,并将定位数据通过指
挥机传回服务器中,以此实现对自卸车卸料位置信息的获取和传输。自卸车定位信息可用以下集合
表示:
D dump ={x,y,H,t,S } (6)
[26]
式中:D dump 为自卸车的定位信息, S 为自卸车状态(0 为未卸料状态,1 为卸料状态) 。
仓面初始信息为施工开始前确定的仓面基本信息。需要由现场管理人员划定施工仓面,并利用
测量杆确定仓面边界点坐标,再根据碾压质量实时监控系统 [27] 获取前序碾压工艺的平整度情况以及
平均高程情况 [28] ,由此获取到施工开始前的仓面位置、大小、平整度等信息。
4 基于砾石土摊铺质量元胞自动机模型的推土机路径规划方法
砾石土摊铺质量元胞自动机模型解决了实时监控数据向全仓面质量信息转化的问题。然而依靠
此模型只能做到摊铺质量信息的实时更新,无法实现对作业方式的指导。因此需要建立一套路径规
划方法,以优化厚度和平整度为目标,引导推土机的行动。根据 3.2 节所述的摊铺工艺特点可知,推
土机的作业应遵循并适合现场的进占法施工工艺,即自卸车将砾石土卸在铺料层与未铺料层交界
处,再由推土机将土推向未铺料层。一般来说,推土机操作手会将一个土堆推平后寻找下一个最近
的土堆再次推平。受人工经验启发,可将整个仓面的推土机路径规划分为寻找并走向最近土堆的全
局静态路径规划和推平指定土堆的局部动态路径规划两部分。前者的活动区域为全仓面,因而需要
考虑坝面复杂环境,避开埋设的监测仪器等障碍物,后者的活动区域为料堆附近,更关注于该区域
是否完全推平,因而更多的考虑施工作业的特点,引入局部质量评价方法对其进行判定 [29] 。
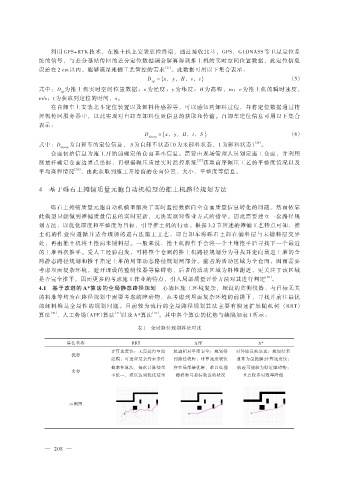
4.1 基于改进的 A*算法的全局静态路径规划 心墙区施工环境复杂,埋设的监测仪器、与目标无关
的料堆等均为在路径规划中需要考虑的障碍物,在考虑到坝面复杂环境的前提下,寻找并前往最优
的卸料堆是全局性的规划问题。目前较为流行的全局路径规划算法主要有快速扩展随机树 (RRT)
算法 [30] 、人工势场(APF)算法 [31] 以及 A*算法 [32] 。其中各个算法的优势与缺陷如表 1 所示:
表 1 全局路径规划算法对比
算法名称 RRT APF A*
计算速度快;无需进行空间 轨迹相对平滑安全;规划得 对环境反映迅速;规划结果
优势
建模;可适应复杂约束条件 到路径较短;计算速度较快 通常为最优解;计算速度快;
概率性算法,每次计算结果 存在局部最优解,难以处理 轨迹可能较为贴近障碍物;
劣势
不统一,难以达到较优结果 障碍物与目标较近的状况 节点较多时效率降低
示例图
— 208 —