
Page 85 - 水利学报2021年第52卷第2期
P. 85
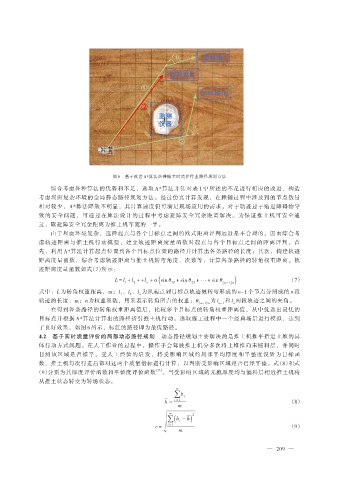
图 6 基于改进 A*算法的摊铺实时监控作业路径规划方法
综合考虑各种算法的优势和不足,选取 A*算法并针对表 1 中所述的不足进行相应的改进,构造
考虑坝面复杂环境的全局静态路径规划方法。经过仿真计算发现,在摊铺过程中涉及到的节点数量
相对较少,A*算法降效不明显,其计算速度仍可满足现场应用的需求。对于轨迹过于贴近障碍物导
致的安全问题,可通过在算法设计的过程中考虑避障安全冗余距离解决。为保证推土机可安全通
过,取避障安全冗余距离为推土机车宽的一半。
由于坝面环境复杂,选择起点与各个目标点之间的欧式距离评判远近是不合理的。因而综合考
虑轨迹距离与推土机行动模型,建立轨迹距离度量函数对起点与各个目标点之间的距离评判。首
先,利用 A*算法计算起点位置到各个目标点位置的路径并计算出各条路径的长度;其次,构建轨迹
距离度量函数,综合考虑轨迹距离与推土机转弯角度、次数等,计算各条路径的转角权重距离。轨
迹距离度量函数如式(7)所示:
n (
L = l + l + +l + α sin θ + sin θ + + sin θ ) (7)
1 2 12 23 (n - 1 )n
式中:L 为转角权重距离,m;l 、l 、l 为从起点到目标点轨迹被转弯形成的 n-1 个节点分割成的 n 段
1 2 n
轨迹的长度,m;α为权重系数,用来表示转角所占的权重;θ (n-1)n 为 l n-1 和 l 两段轨迹之间的夹角。
n
在得到各条路径的转角权重距离值后,比较多个目标点的转角权重距离值,从中优选出最优的
目标点并根据 A*算法计算出的路径指引推土机行动。选取施工过程中一个经典场景进行模拟,达到
了良好效果,如图 6 所示,标红的路径即为最优路径。
4.2 基于实时质量评价的局部动态路径规划 动态路径规划主要解决的是推土机推平指定土堆的具
体行动方式问题。在人工作业的过程中,操作手会驾驶推土机分多次将土堆推向未铺料层,并同时
目测该区域是否推平。受人工经验的启发,将受影响区域的局部平均厚度和平整度设置为目标函
数,推土机每次行进后都对这两个质量指标进行计算,以判断受影响区域是否已经平整。式(8)和式
(9)分别为其厚度评价函数和平整度评价函数 [33] 。当受影响区域的元胞厚度均与铺料层相近推土机将
从推土状态转变为转场状态。
m
å h
- i
h = i = 1 (8)
m
m
- 2
å(h - h )
i
e = i = 1 (9)
m
— 209 —