
Page 83 - 水利学报2021年第52卷第2期
P. 83
机作为研究对象建立其行动模型 [23] ,如下所示:
ìM left v left > v right
ï ï
ï ï M right v right > v left
M action = í (4)
ï ï M forward v left = v right > 0
ï ï M v = v
î backward left right < 0
式中:M action 为行进模式,可分为 M 左转弯、M right 右转弯、M forward 前进和 M backward 后退;v 和 v right 分别
left
left
为推土机左右履带的转速,顺时针为正,逆时针为负。
由式(1)可知,前进后退是两条履带同向同速行进,而转弯是由于两条履带差速导致的方向偏
[24]
移 (一般是一条履带固定,一条履带转动的形式)。根据履带式推土机行走系统的特点可知,推土
机更倾向于直行,因而在路径规划中应减少转向,尽量选择直行的运动方式。根据现场施工工艺,
自卸车采用平行坝轴线进占卸料的方式,利用 20 t 自卸汽车从砾石土料场运到铺料层边缘处卸料;摊
铺采用平行坝轴线进占法施工,利用推土机将料从铺料层的边缘推到未进行摊铺的低面,自卸车卸
料和推土机摊铺两者同时进行。图 3 为砾石土心墙进占法施工示意图。另外,在现场施工中为节省卸
料时间,常采用抬斗后前行的卸料方式,由此形成的卸料堆近似为梯形体。通过实地测量卸料堆形
态参数可得出,土堆宽度与车宽相近约为 3 m,其横截面为梯形,图 4 所示为卸料过程图。
图 3 砾石土心墙进占法施工图 图 4 卸料过程图
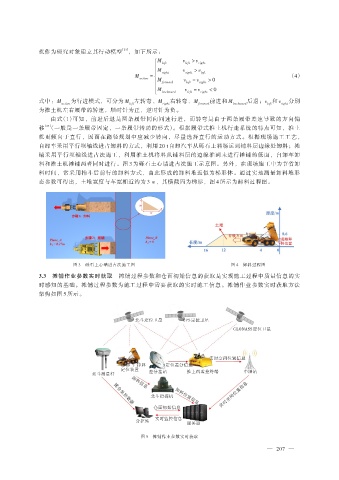
3.3 摊铺作业参数实时获取 摊铺过程参数和仓面初始信息的获取是实现施工过程中质量信息的实
时感知的基础。摊铺过程参数为施工过程中需要获取的实时施工信息。摊铺作业参数实时获取方法
架构如图 5 所示。
北斗定位卫星 GPS 定位卫星
GLONASS 定位卫星
实时空间位置信息
自 卸 车 卸 料 定位差分信息
定位装置
北斗测量杆 卸料信息 差分基站 推土机监控终端 中继站
实时空间位置信息
北斗指挥机 卸料位置信息
建仓坐标数据
仓面初始信息
实时监控信息
分控站
服务器
图 5 摊铺作业参数实时获取
— 207 —