
Page 92 - 水利学报2021年第52卷第4期
P. 92
差(Relative Error,RE)、平均绝对百分比误差(Mean Absolute Percentage Error,MAPE)、均方根误差
(Root Mean Square Error,RMSE)作为评价指标。评价指标表达式为:
y - y ′
i
RE = i × 100% (22)
y ′ i
式中: y 为实际输出值; y ′ 为期望值。
i
i
n | y - y ′ |
MAPE = 1 å | | i i | | × 100% (23)
n i = 1| y ′ i |
n
RMSE = 1 å( y - y ′ ) 2 (24)
n i i
i = 1
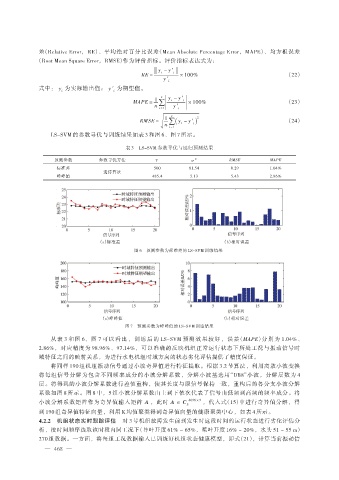
LS-SVM 的参数寻优与训练结果如表 3 和图 6、图 7 所示。
表 3 LS-SVM 参数寻优与回归预测结果
预测参数 参数寻优方法 γ σ 2 RMSE MAPE
标准差 500 81.54 0.29 1.04%
遗传算法
峰峰值 485.4 5.13 5.43 2.86%
(a)标准差 (b)相对误差
图 6 预测参数为标准差的 LS-SVM 训练结果
(a)峰峰值 (b)相对误差
图 7 预测参数为峰峰值的 LS-SVM 训练结果
从 表 3 和 图 6、 图 7 可 以 看 出 , 训 练 后 的 LS-SVM 预 测 效 果 较 好 , 误 差(MAPE)分 别 为 1.04%、
2.86%,对应精度为 98.96%、97.14%,可以准确的反映机组正常运行状态下所处工况与振动信号时
域特征之间的映射关系,为进行水电机组时域方向的状态劣化评估提供了精度保证。
将同样 190 组机组振动信号通过小波奇异值进行特征提取。根据 3.2 节算法,利用离散小波变换
将每组信号分解为包含不同频率成分的小波分解系数,分解小波基选用“DB8”小波,分解层数为 4
层。将得到的小波分解系数进行差值重构,使其长度与原信号保持一致,重构后的各分支小波分解
系数如图 8 所示。图 8 中,5 组小波分解系数由上到下依次代表了信号由低频到高频的频率成分。将
小波分解系数矩阵作为奇异值输入矩阵 A ,此时 A ∈ C 4096 × 5 ,代入式(15)中进行奇异值分解,得
5
到 190 组奇异值特征向量,利用 K 均值聚类得到奇异值向量的健康聚类中心,如表 4 所示。
4.2.2 机组状态实时跟踪评估 对 3 号机组故障发生前到发生时这段时间的运行状态进行劣化评估分
析,按时间顺序选取该时段内同工况下(导叶开度 61% ~ 65%,桨叶开度 16% ~ 20%,水头 51 ~ 55 m)
270 组数据。一方面,将每组工况数据输入已训练好机组状态健康模型,即式(21),计算当前振动信
— 468 —