
Page 122 - 2024年第55卷第6期
P. 122
1
πβ
( ) β
Γ (1 + β ) × sin
= 2 (23)
σ u β 1
( )
β -
Γ 1 + 2 × β × 2 ( 2)
式中 Γ为标准伽马函数。
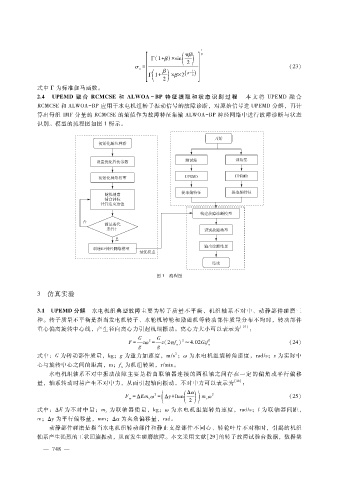
2.4 UPEMD 融 合 RCMCSE 和 ALWOA- BP特 征 提 取 和 状 态 识 别 过 程 本 文 将 UPEMD 融 合
RCMCSE和 ALWOA - BP应用于水电机组转子振动信号的故障诊断,对原始信号进 UPEMD分解,再计
算出每组 IMF分量的 RCMCSE的熵值作为故障特征集输 ALWOA - BP神经网络中进行故障诊断与状态
识别。模型的流程图如图 1所示。
图 1 流程图
3 仿真实验
3.1 UPEMD分解 水电机组典型故障主要为转子质量不平衡、机组轴系不对中、动静部件碰磨三
种。转子质量不平衡是指当发电机转子、水轮机转轮和励磁机等转动部件质量分布不均时,转动部件
重心偏离旋转中心线,产生径向离心力引起机组振动。离心力大小可以表示为 [27] :
G 2 G 2 2
F = z ω = z(2 π f)≈4.02Gzf (24)
g g n n
2
式中:G为转动部件质量,kg;g为重力加速度,m?s;ω为水电机组旋转角速度,rad?s;z为实际中
心与旋转中心之间的距离,m;f为机组转频,r?min。
n
水电机组轴系不对中振动故障主要是指由联轴器连接的两根轴之间存在一定的偏角或平行偏移
量,轴系转动时易产生不对中力,从而引起轴向振动。不对中力可以表示为 [28] :
Δα
(
2
F = Δ Emω = Δ y + ltan ( )) mω 2 (25)
c
c
m
2
式中:Δ E为不对中量;m 为联轴器质量,kg;ω为水电机组旋转角速度,rad?s;l为联轴器间距,
c
m;Δ y为平行偏移量,mm;Δα为夹角偏移量,rad。
动静部件碰磨是指当水电机组转动部件和静止支撑部件不同心、转轮叶片不对称时,引起的机组
轴系产生强烈的工状回旋振动,从而发生碰磨故障。本文采用文献[ 29]的转子故障试验台数据,数据集
8
— 7 4 —