
Page 31 - 2024年第55卷第7期
P. 31
向量 e。Trajectron ++ 使用条件变分自编码器(ConditionalVariationalAuto - Encoders,CVAE)来获得轨迹
x
的多模态分布 [32] ,将 e输入到全连接层编码,并通过随机采样获得隐变量 z,表征高级的潜在行为模
x
式 [32] 。在解码端,将 e和 z连接一起先经过全连接层计算门限循环网络(GateRecurrentUnit,GRU)单
x
元的初始隐层状态,再通过 GRU网络单元递归计算未来一段时间可能轨迹的二元高斯分布参数,进
而构建二元高斯混合模型(GMM)来采样获得未来每一时刻施工机械行驶的加速度,最终通过动态整
合模块计算未来每一时刻的预测轨迹。由于原始 Trajectron ++ 考虑了人和车辆不同节点的动力特性 [32] ,
在本研究中只考虑施工机械之间的影响,因此,动态整合模块使用更为接近车辆动力特性的动态扩展
车辆模型 [32] 。此外,原始 Trajectron ++ 还包括道路地图的编码,由于坝面不存在道路的约束,本研究
简化了该模块以提高模型计算效率。综上,综合编码器和解码器的输出,Trajectron ++ 的目标函数定义
如下式:
N
max ∑ z~q φ (z x i ,y i )[logp(y x,z)] - β D (q(zx,y) p(zx))+α I(x;z) (1)
KL
φ
i
ψ
i
i
q
i
i
i
θ
φ ,θ ,ψ i =1
· t - t 0 :t
t - t 0 :t
t - t 0 :t
¨ t - t 0 :t
¨ t - t 0 :t
· t - t 0 :t
式中:x为前序 t时间步的轨迹状态信息[p ;p ; p ; p ;p ;p ]所组成的第 i个输
i 0 i ,x i ,y i ,x i ,y i ,x i ,y
t - t 0 :t
· t - t 0 :t
· t - t 0 :t
入样本,p t - t 0 :t 和 p 分别表示前序 t时间步的二维位置信息,p 和 p 分别对应前序 t时间步的速
i ,x i ,y 0 i ,x i ,y 0
¨ t - t 0 :t
¨ t - t 0 :t
度信息,p 和 p 分别对应前序 t时间步的加速度信息;y为第 i样本对应预测的后续 t时间步的
i ,x i ,y 0 i 1
轨迹位置输出[p t:t + t 1 ;p t:t + t 1 ];z为潜在空间的离散隐变量;p(y x,z)和 q(zx,y)分别对应于深
i,y
i
i,x
i
i
i
φ
ψ
度神经网络所构建的解码器和编码器;p(zx)为编码器所近似的离散隐变量 z的 条件 先验分布,
θ i
I(x;z)为 x和 z在 q(x,z)分布下的互信息;α和 β 为超参数;ψ 、φ和 θ 为对应深度神经网络的可
q i i φ i
训练参数;N为样本总数。
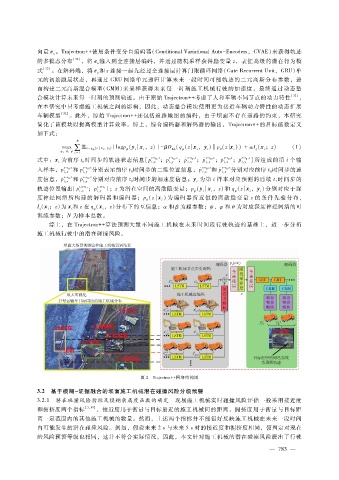
综上,在 Trajectron ++ 算法预测大量不同施工机械在未来时间段行驶轨迹的基础上,进一步分析
施工机械行驶中的潜在碰撞风险。
图 2 Trajectron ++ 网络结构图
3.2 基于模糊- 证据融合的坝面施工机械潜在碰撞风险分级预警
3.2.1 潜在碰撞风险指标及模糊隶属度函数的确定 现场施工机械实时碰撞风险评估一般采用接近度
和拥挤度两个指标 [3,14] ,接近度用于衡量与目标最近的施工机械间的距离,拥挤度用于衡量与目标距
离一定范围内的其他施工机械的数量。然而,上述两个指标并不能很好反映施工机械在未来一段时间
内可能发生的潜在碰撞风险。例如,假设未来 2s与未来 5s时的接近度和拥挤度相同,便判定对现在
的风险预警等级也相同,这并不符合实际情况。因此,本文针对施工机械的潜在碰撞风险提出了行驶
— 7 8 3 —