
Page 34 - 2024年第55卷第7期
P. 34
(2)实验结果。使用迁移学习方法的全局微调策略对 Trajectron ++ 网络进行训练,加载在 ETH数据
集上预训练的模型权重,输入为 7条历史轨迹位置,预测未来 6s共计 12条轨迹位置,设置最大训练
次数为 100个 epoch,学习率初始化为 0.001,使用指数衰减策略,gamma为 0.9999,使用旋转轨迹进
行数据增强,Batch为 256,Adam优化器。
轨迹预 测 常 用 的 评 估 指 标 有 最 终 位 移 误 差 ( FinalDisplacementError, FDE)和 平 均 位 移 误 差
( AverageDisplacementError,ADE)等 [21,32] 。FDE用于衡量预测轨迹和真实轨迹在最终时刻位置的欧
式距离,计算如式( 5);ADE用于衡量预测轨迹和真实轨迹在未来一段时间内(本研究中为 6s)所有
位置的平均欧式距离,计算如式( 6):
1 n
( ^x -x) +( ^y -y)
FDE= ∑ 槡 T T 2 T T 2 (5)
i
i
i
i
n i =1
1 n T
t
t 2
t 2
t
ADE= ∑∑ 槡 ( ^x -x ) +( ^y -y ) (6)
i
i
i
i
nT i =1 t =1
t
t
t
t
式中: ^x和 ^y分别为模型预测的第 i个样本在 t时刻轨迹位置的横纵坐标;x和 y分别为真实轨迹中
i i i i
第 i个样本在 t时刻轨迹位置的横纵坐标;n为样本总数;T为预测轨迹的最终时刻。
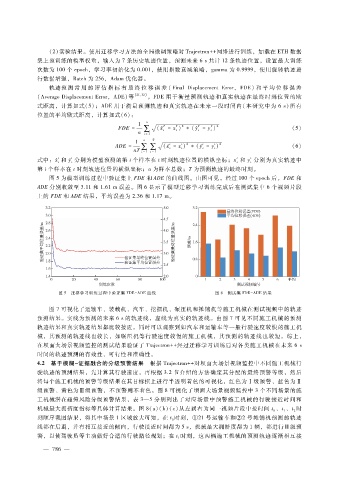
图 5为模型训练过程中验证集上 FDE和 ADE的曲线图。由图可见,经过 100个 epoch后,FDE和
ADE分别收敛至 3.11和 1.61m误差。图 6显示了模型迁移学习训练完成后在测试集中 6个视频片段
上的 FDE和 ADE结果,平均误差为 2.36和 1.17m。
图 5 迁移学习训练过程中验证集 FDE - ADE曲线 图 6 测试集 FDE - ADE结果
图 7可视化了运输车、装载机、汽车、挖掘机、碾压机和摊铺机等施工机械在测试视频中的轨迹
预测结果。实线为预测的未来 6s的轨迹线,虚线为真实的轨迹线。由图 7可见不同施工机械的预测
轨迹结果和真实轨迹结果都比较接近。同时可以观察到如汽车和运输车等一般行驶速度较快的施工机
械,其预测的轨迹线也较长,如碾压机等行驶速度较慢的施工机械,其预测的轨迹线也较短。综上,
在坝面大场景视频监控的测试结果验证了 Trajectron ++ 经过迁移学习训练后对各类施工机械在未来 6s
时间的轨迹预测的有效性、可行性和准确性。
4.2 基于模糊- 证据融合的分级预警结果 根据 Trajectron ++ 对坝面大场景视频监控中不同施工机械行
驶轨迹的预测结果,先计算其行驶速度,再根据 3.2节介绍的方法确定其分配的最终预警等级,然后
将每个施工机械的预警等级结果在其目标框上进行半透明着色的可视化,红色为Ⅰ级预警、蓝色为Ⅱ
级预警、黄色为Ⅲ级预警,不预警则不着色。图 8可视化了坝面大场景视频监控中 3个不同场景的施
工机械潜在碰撞风险分级预警结果,表 3—5分别列出了对应场景中预警施工机械的行驶接近时间和
机械最大拥挤度指标等具体计算结果。图 8(a)(b)(c)从左到右为同一视频片段中按时间 t、t、t时
0 1 2
刻顺序截图结果,将其中场景 1区域放大可知,在 t时刻,①21号运输车和②2号摊铺机预测的轨迹
0
线都在后退,并有相互接近的倾向,行驶接近时间都为 5s,机械最大拥挤度都为 1辆,都进行Ⅲ级预
警,以使驾驶员等主动做好合适的行驶路径规划;在 t时刻,这两辆施工机械的预测轨迹逐渐相互接
1
6
— 7 8 —