
Page 30 - 2024年第55卷第7期
P. 30
撞风险,构建了行驶接近时间和机械最大拥挤度两个风险指标,定义模糊规则及每个指标对施工机械
潜在碰撞风险预警等级的模糊隶属度函数,进而计算每个施工机械对这两个风险指标的模糊隶属度;
然后,利用证据融合方法将不同指标预警结果进行融合,确定最终的预警等级( Ⅰ级预警、Ⅱ级预警、
Ⅲ级预警、不预警);最后,对需要预警的施工机械在目标跟踪结果上进行可视化提醒,通过不同的
半透明着色框来区分不同等级的预警结果,为施工管理人员有效管控和预防坝面施工机械潜在碰撞风
险提供一种直观的监控手段。
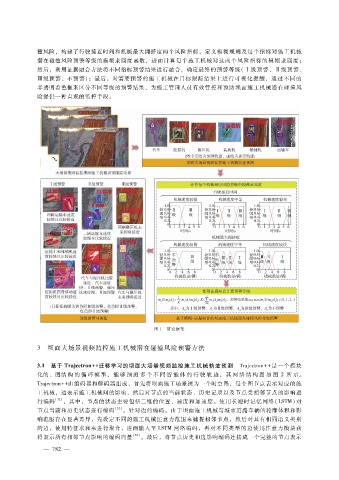
图 1 研究框架
3 坝面大场景视频监控施工机械潜在碰撞风险预警方法
3.1 基于 Trajectron ++ 迁移学习的坝面大场景视频监控施工机械轨迹预测 Trajectron ++ 是一个模块
化的、图结 构 的 循 环 模 型, 能 够 预 测 多 个 不 同 智 能 体 的 行 驶 轨 迹, 其 网 络 结 构 图 如 图 2所 示。
Trajectron ++ 由编码器和解码器组成,首先将坝面施工场景视为一个时空图,每个图节点表示对应的施
工机械,边表示施工机械间的影响,然后对节点的当前状态、历史记录以及节点受相邻节点的影响进
行编码 [32] ,其中,节点的状态主要包括二维的位置、速度和加速度。使用长短时记忆网络(LSTM)对
节点当前和历史状态进行编码 [32] 。针对边的编码,由于坝面施工机械与城市道路车辆的轮廓体积和影
响范围存在显著差异,先设定不同的施工机械注意力范围来捕捉相邻节点,然后对具有相同语义类别
的边,使用特征求和来进行聚合,进而输入至 LSTM网络编码,再对不同类型的边使用注意力模块获
得表示所有相邻节点影响的编码向量 [32] 。最后,将节点历史和边影响编码连接成一个完整的节点表示
2
— 7 8 —