
Page 35 - 2024年第55卷第7期
P. 35
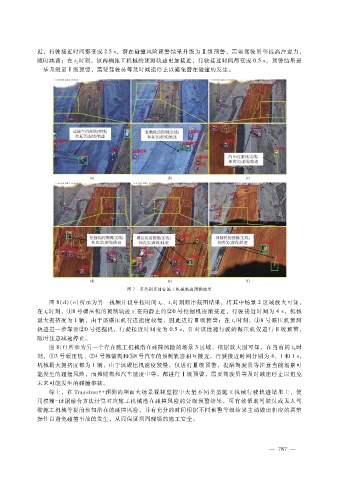
近,行驶接近时间都变成 2.5s,潜在碰撞风险预警结果升级为Ⅱ级预警,需要驾驶员等提高注意力,
随时减速;在 t时刻,该两辆施工机械的预测轨迹更加接近,行驶接近时间都变成 0.5s,预警结果进
2
一步升级至Ⅰ级预警,需要驾驶员等及时减速停止以避免潜在碰撞的发生。
图 7 多类别多目标施工机械轨迹预测结果
图 8(d)(e)所示为另一视频片段中按时间 t、t时刻顺序截图结果,将其中场景 2区域放大可知,
0 1
在 t时刻,①8号碾压机的预测轨迹正在向静止的②0号挖掘机逐渐接近,行驶接近时间为 4s,机械
0
最大拥挤度为 1辆,由于该碾压机行进速度较慢,因此进行Ⅲ级预警;在 t时刻,①8号碾压机预测
1
轨迹进一步靠近②0号挖掘机,行驶接近时间变为 0.5s,针对该慢速行驶的碾压机仅进行Ⅱ级预警,
随时注意减速停止。
图 8(f)所示为另一个存在施工机械潜在碰撞风险的场景 3区域,根据放大图可知,在当前的 t时
0
刻,①3号碾压机、②4号摊铺机和③8号汽车的预测轨迹相互接近,行驶接近时间分别为 4、1和 1s,
机械最大拥挤度都为 1辆,由于该碾压机速度较慢,仅进行Ⅲ级预警,提醒驾驶员等注意当前场景可
能发生的碰撞风险,而摊铺机和汽车速度中等,都进行Ⅰ级预警,需要驾驶员等及时减速停止以避免
未来可能发生的碰撞事故。
综上,在 Trajectron ++ 预测的坝面大场景视频监控中大量不同类型施工机械行驶轨迹结果上,使
用模糊- 证据融合方法计算对应施工机械潜在碰撞风险的分级预警结果,可有效帮助驾驶员或无人驾
驶施工机械等提前预知潜在的碰撞风险,并有充分的时间根据不同预警等级结果主动做出相应的调整
操作以避免碰撞事故的发生,从而保证坝面现场的施工安全。
— 7 8 7 —