
Page 138 - 2025年第56卷第8期
P. 138
5.2 工程运输调度仿真及最优解获取 由随机程序确定 g、n 为混凝土接收点位,p、q 为渣料产出点,
从而进行后续仿真计算。根据 2023 年 12 月现场施工作业强度统计,日施工强度为 260 ~ 360 m ,重型
3
3[30]
自卸汽车每车作业强度为 12 m 。结合运输车作业强度、日施工强度等数据资料得出初始点位列表
如下:['a']:19;['b']:35;['c']:49;['d']:49;['e']:49;['g']:25;['n']:24;['p']:25;
['q']:29;['f']:10(['a']:19 表示“a”点位在本次仿真过程中出现 19 次)。
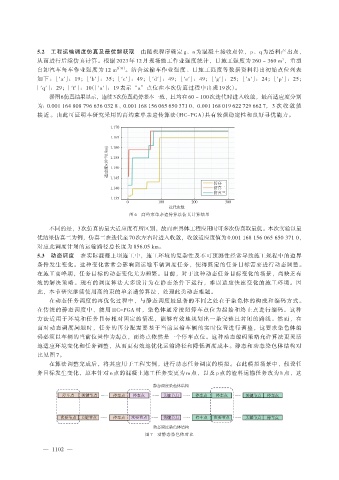
据图6仿真结果显示,连续3次仿真趋势基本一致,且均在 60 ~ 100次迭代时进入收敛,最高适应度分别
为:0.001 164 808 796 636 032 8 、0.001 168 156 065 650 371 0、0.001 168 019 622 729 662 7, 3 次 收 敛 值
接 近 。 由此可证明本研究采用的高约束单亲遗传算法(HC-PGA)具有较强稳定性和良好寻优能力。
图 6 高约束单亲遗传算法仿真计算结果
不同的是,3次仿真的最大适应度有所区别,故而在具体工程应用时可多次仿真取最优。本次实验以最
优结果仿真二为例,仿真二在迭代至 70次左右时进入收敛,收敛适应度值为 0.001 168 156 065 650 371 0,
对应此调度计划的运输路径总长度为 856.05 km。
5.3 动态调度 在实际混凝土坝施工中,施工环境的复杂性及不可预测性经常导致施工规程中的边界
条件发生变化。这种变化常常会影响到运输车辆调度任务,使得既定的任务目标需要进行动态调整。
在施工高峰期,任务目标的动态变化尤为频繁。目前,对于这种动态任务目标变化的场景,尚缺乏有
效的解决策略。现有的调度算法大多设计为在静态条件下运行,难以适应快速变化的施工环境。因
此,本节研究继续使用高约束的单亲遗传算法,处理此类动态难题。
在动态任务调度的再优化过程中,与静态调度最显著的不同之处在于染色体的构成和编码方式。
在传统的静态调度中,使用 HC-PGA 时,染色体通常按照停车点位为起始和终止点进行编码。这种
方法适用于环境和任务目标相对固定的情况,能够有效地规划出一条完整且封闭的路线。然而,在
面对动态调度问题时,任务的再分配需要基于当前运输车辆的实时位置进行调整,这要求染色体编
码必须以车辆的当前位置作为起点,而终点依然是一个停车点位。这种动态编码策略允许算法更灵活
地适应环境变化和任务调整,从而更有效地优化运输路径和降低调度成本。静态和动态染色体结构对
比见图 7。
在算法调整完成后,将其应用于工程实例,进行动态任务调度的模拟。在此模拟场景中,假设任
务目标发生变化,原本针对 n 点的混凝土施工任务变更为 m 点,以及 p 点的渣料运输任务改为 h 点,这
图 7 动静态染色体对比
— 1102 —