
Page 72 - 2022年第53卷第2期
P. 72
尝试,反之,则将该离散点状态标记为占用态,并记录投放在该离散点上的骨料序号和更新多重点
云状态(即多重点云中离散点的状态)。
对于特大石骨料、大石骨料及中石骨料,如果遍历其所在粒级的自由态离散点均无法成功投
放,则放弃该骨料投放。而对于数量占比大(见表 2)但体积占比仅约 20%左右的小石骨料,考虑到其
在全级配混凝土细观结构中不占主导地位,故为避免因投放小石骨料的尝试次数过多导致全级配混
凝土三维细观结构生成效率的大幅降低,对投放单个小石骨料的最大允许尝试次数进行限制(本文取
为 1000)。对于尝试次数达到其最大允许值时仍未成功投放的小石骨料,放弃对其进行投放。
与传统随机取放法相比,在自由态离散点中随机选取骨料参考点位置的优点在于既可保证其位
于已投骨料边界以外,又在很大程度上降低了当前投放骨料与已投骨料尤其是同一粒级已投骨料发
生“侵入”的可能性,从而可减少尝试次数。
在成功投放某一骨料后,需更新其所在粒级与尚未进行骨料投放粒级的点云状态,若通过遍历
上述粒级点云中所有处于自由态的离散点并通过计算判断其是否被该骨料覆盖来实施点云状态更
新,耗时势必很长。为此,提出一种基于多重点云空间结构的点云状态快速更新方法。具体而言,
j
在通过占用第 i 重点云中第 j 个离散点P 成功投放某骨料后,依据该骨料所在粒级的最大骨料粒径d i
i max
|
j * *
直接确定第 i 重点云中位于P 周围的可能被该骨料覆盖的离散点集P ,该集合中的离散点数量| P 可
i i i
按下式计算:
| P i * | = d i D i ù 3 - 1 (9)
é max
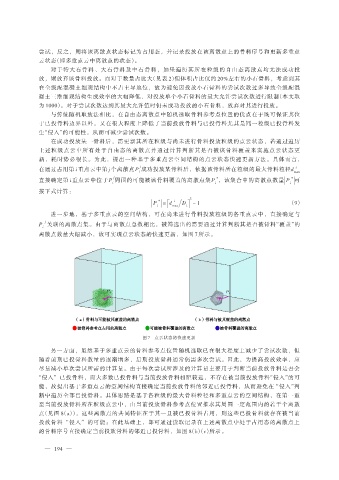
进一步地,基于多重点云的空间结构,可在尚未进行骨料投放粒级的各重点云中,直接确定与
j
P 关联的离散点集。由于与离散点总数相比,被筛选出的需要通过计算判断其是否被骨料“覆盖”的
i
离散点数量大幅减小,故可实现点云状态的快速更新,如图 7 所示。
j
P i j
P i
图 7 点云状态的快速更新
另一方面,虽然基于多重点云的骨料参考点位置随机选取已在很大程度上减少了尝试次数,但
随着前期已投骨料数量的逐渐增多,后期投放骨料通常仍需多次尝试。因此,为提高投放效率,应
尽量减小单次尝试所需的计算量。由于每次尝试所涉及的计算量主要用于判断当前投放骨料是否会
“侵入”已投骨料,而大多数已投骨料与当前投放骨料相距较远,不存在被当前投放骨料“侵入”的可
能,故提出基于多重点云的空间结构直接确定当前投放骨料的邻近已投骨料,从而避免在“侵入”判
断中遍历全部已投骨料。具体思路是基于各粒级的最大骨料粒径和多重点云的空间结构,在第一重
至当前投放骨料所在粒级点云中,由当前投放骨料参考点位置推求其周围一定范围内的若干个离散
点(见图 8(a)),这些离散点的共同特征在于其一旦被已投骨料占用,则这些已投骨料就存在被当前
投放骨料“侵入”的可能;在此基础上,即可通过读取记录在上述离散点中处于占用态的离散点上
的骨料序号直接确定当前投放骨料的邻近已投骨料,如图 8(b)(c)所示。
— 194 —