
Page 128 - 2023年第54卷第5期
P. 128
对系统振荡特性更敏感,由尾水隧洞 - 下游调压室系统引起转速尾波振荡频率更低,衰减指数更小。
相较上游调压室面积,尾水调压室面积为设计面积的 50%时,转速尾波快速发散,小波动系统振荡失
稳,原因在于尾水隧洞长度远长于引水隧洞长度,水流惯性时间常数更大,对于小波动系统稳定性更不
利,需要更大调压室面积来抑制室内水体的波动,进而降低机组转速尾波低频振荡带来的不利影响。
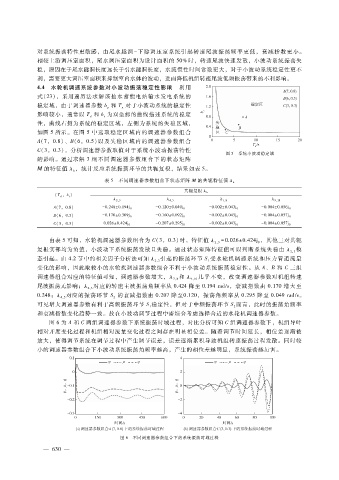
4.4 水轮机调速系统参数对小波动振荡稳定性影响 利用
式( 23),采用遍历法求解该抽水蓄能电站输水发电系统的
稳定域,由于调速器参数 b 和 T 对于小波动系统的稳定性
p
n
影响较小,通常以 T 和 b为双坐标的曲线描述系统的稳定
d t
性,曲线右侧为系统的稳定区域,左侧为系统的失稳区域,
如图 5所示。在图 5中选取稳定区域内的调速器参数组合
A(7,0.8)、B(6,0.5)以及失稳区域内的调速器参数组合
C(3,0.3),分析调速器参数取值对于系统小波动振荡特性
图 5 系统小波动稳定域
的影响。通过求解 3组不同调速器参数组合下的状态矩阵
,统计反应系统振荡环节的共轭复根,结果如表 5。
M 的特征值 λ k
表 5 不同调速器参数组合下状态矩阵 M 的共轭特征值 λ k
共轭复根 λ k
(T d ,b t )
λ 2,3 λ 4,5 λ 7,8 λ 9,10
A(7,0.8) - 0 .248±0.194j - 0 .120±0.049j - 0 .002±0.043j 0 - 0 .004±0.056j
0
0
0
B(6,0.5) - 0.170±0.309j - 0.160±0.092j - 0.002±0.043j 0 - 0.004±0.057j
0
0
0
C(3,0.3) 0.026±0.424j - 0 .207±0.295j - 0 .002±0.043j 0 - 0 .004±0.057j
0
0
0
= 0 .026±0.424j,其他三对共轭
0
由表 5可知,水轮机调速器参数组合为 C(3,0.3)时,特征值 λ 2,3
模
复根实部均为负值,小波动下系统振荡发散且失稳。通过状态矩阵特征值可以判断系统失稳由 λ 2,3
引起的振荡环节 S受水轮机调速系统和压力管道流量
1
态引起。由 4.2节中的相关因子分析法可知 λ 2,3
变化的影响,因此取较小的水轮机调速器参数组合不利于小波动系统振荡稳定性。从 A、B和 C三组
几乎不变,改变调速器参数对机组转速
调速器组合对应的特征值可知,调速器参数增大,λ 7,8 和 λ 9,10
对应的转速主波振荡角频率从 0.424降至 0.194rad?s,衰减指数由 0.170增大至
尾波振荡无影响;λ 2,3
对应的振荡环节 S 的衰减指数由 0.207降至0.120,振荡角频率从 0.295降至 0.049rad?s。
0.248;λ 4,5 2
可见增大调速器参数有利于高频振荡环节 S稳定性,但对于中频振荡环节 S而言,此时的振荡角频率
2
1
和衰减指数变化趋势一致。故在小波动调节过程中需综合考虑选择合适的水轮机调速器参数。
图 6为 A和 C两组调速器参数下系统振荡时域过程,对比分析可知 C组调速器参数下,机组导叶
相对开度变化过程和机组相对流量变化过程之间存在明显相位差。随着调节时间延长,相位差逐渐被
放大,使得调节系统在调节过程中产生调节误差,误差逐渐累积导致机组转速振荡过程发散。同时较
小的调速器参数组合下小波动系统振荡角频率越高,产生的相位差越明显,系统振荡越厉害。
图 6 不同调速器参数组合下的系统振荡时域过程
0
— 6 3 —