
Page 124 - 2023年第54卷第5期
P. 124
f( λ ) = λ E - M = 0 (24)
式中:λ为矩阵 M 的特征值;E为 10阶单位矩阵。
方程(24)的阶数为 10,矩阵 M 相对应有 10个特征值,故式(24)可写成式(25):
10
9
a λ + aλ + …+ aλ + a= 0 (25)
9
0
1
10
式中:a,a,a,…,a 为方程系数,由式(24)中的行列式 λ E - M 展开求得。
0 1 2 10
(k = 1 ,2,…,10),进而研究系统发生小波动时的振荡
通过求解式(25)可以得到系统的特征值 λ k
特性,同时利用四阶龙格库塔法求解式( 23)得到抽水蓄能电站输水发电系统小波动下的振荡时域过程。
4 系统小波动稳定性分析
4.1 数学模型验证 由于图 1中的输水发电系统小波动稳定分析的数学模型高达 10阶,为了避免在
推导过程中出现错误,确保小波动数学模型的正确性,采用四阶龙格库塔法求解式( 23)得到系统振荡
时域过程,同时与基于特征线法 [21] 的数值模拟得到的系统振荡时域过程进行对比。本文计算采用的工
况:两台机组额定水头、额定流量和额定出力运行,分别受到 10%的负荷扰动。机组在初始稳态工况
点的参数如表 2,水轮机调速器参数 b、b、T、T 分别取 0.5、0、6.0s和 0s,计算结果如图 2。
p
t
n
d
表 2 初始稳态时的机组参数
3
机组编号 出力?MW 工作水头?m 引用流量?(m ?s) s s s 3 s
4
1
2
3 # 357.13 480.96 84.04 - 0.653 0.746 - 1.973 0.662
4 # 357.13 480.96 84.04 - 0.653 0.746 - 1.973 0.662
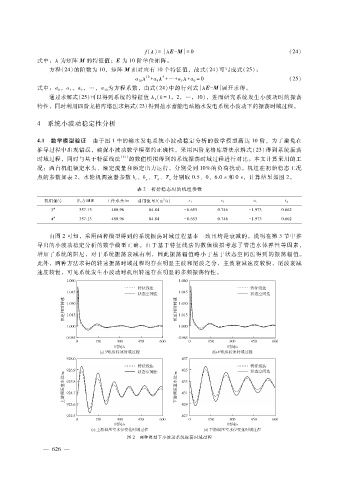
由图 2可知,采用两种模型得到的系统振荡时域过程基本一致且均是衰减的,说明在第 3节中推
导出的小波动稳定分析的数学模型正确。由于基于特征线法的数值模拟考虑了管道水体弹性等因素,
增加了系统的阻尼,对于系统振荡衰减有利,因此振荡幅值略小于基于状态空间法得到的振荡幅值。
此外,两种方法求得的转速振荡时域过程均存在明显主波和尾波之分,主波衰减速度较快,尾波衰减
速度较慢,可见系统发生小波动时机组转速存在明显的多频振荡特性。
图 2 两种模型下小波动系统振荡时域过程
— 6 2 —
6