
Page 19 - 2023年第54卷第5期
P. 19
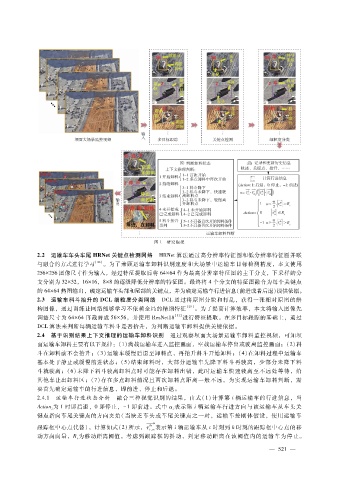
图 1 研究框架
2.2 运输车车头车尾 HRNet关键点检测网络 HRNet算法通过高分辨率特征图和低分辨率特征图并联
与融合的方式进行学习 [26] 。为了兼顾运输车卸料识别速度和大场景中运输车目标检测精度,本文使用
256 × 256图像尺寸作为输入,经过特征提取后将 64 × 64作为最高分辨率特征图的主干分支,下采样的分
支分别为 32 × 32,16 × 16,8 × 8的逐级降低分辨率的特征图。最终将 4个分支的特征图融合为每个关键点
的 64 × 64热图输出,确定运输车头部和尾部的关键点,并为确定运输车行进信息(前进或者后退)提供依据。
2.3 运输车料斗抬升的 DCL细粒度分类网络 DCL通过将原图分块和打乱,获得一张相对原图的解
构图像,通过训练让网络能够学习不依赖全局的精细特征 [29] 。为了提高计算效率,本文将输入图像先
调整尺寸为 64 × 64再裁剪成 56 × 56,并使用 ResNet18 [31] 进行特征提取。在多目标跟踪的基础上,通过
DCL算法来判断每辆运输车料斗是否抬升,为判断运输车卸料提供关键依据。
2.4 基于识别结果上下文推理的运输车卸料识别 通过观察坝面大场景运输车卸料监控视频,可知坝
面运输车卸料主要有以下规律:( 1)满载运输车进入监控画面,空载运输车停留或驶离监控画面;(2)料
斗在卸料前不会抬升;( 3)运输车缓慢后退至卸料点,再抬升料斗开始卸料;(4)在卸料过程中运输车
基本处于静止或缓慢前进状态;( 5)结束卸料时,大部分运输车先降下料斗再驶离,少部分未降下料
斗就驶离;(6)未降下料斗驶离卸料点时可能存在卸料出错,此时运输车快速驶离至不远处等待,给
其他车让出卸料区;( 7)存在多点卸料情况且两次卸料点距离一般不远。为实现运输车卸料判断,需
要首先确定运输车的行进信息,即前进、停止和后退。
2.4.1 运输车行进状态分析 融合三种视觉识别的结果,由式(1)计算第 i辆运输车的行进信息,当
表示第 i辆运输车行进方向与该运输车从车头关
i
Action为 1时即后退,0即停止,- 1 即前进。式中 α i
键点指向车尾关键点的方向夹角(当缺乏车头或车尾关键点之一时,运输车按刚体假设,使用运输车
tk →
跟踪框中心点代替),计算如式( 2)所示,τ i ,cc 表示第 i辆运输车从 t时刻到 k时刻的跟踪框中心点的移
动方向向量,R为移动距离阈值。考虑到跟踪框的抖动,判定移动距离在该阈值内的运输车为停止。
s
— 5 2 1 —