
Page 24 - 2023年第54卷第5期
P. 24
合三种视觉识别的实时性,并且考虑到料斗抬升和运输车车头车尾关键点不会瞬间突变,设置 1s进
行一次运输车头尾关键点检测和料斗抬升细粒度分类识别以及对应的行进信息计算,1s内其他视频
1
帧共享这些数据。在卸料判断流程中,N设为 6,N 为 0.8N,N 为 - 0.8 N,N 为 - 0.8 N,N 为
r
f1
r
r
u
p1
r
f2
2
w+ h,N 为 w+ h,w和 h分别为对应目标框的宽和高,N为 0.8N,N 为 1。
槡 2 2 p2 槡 2 2 p p b r d
p
p
p
p
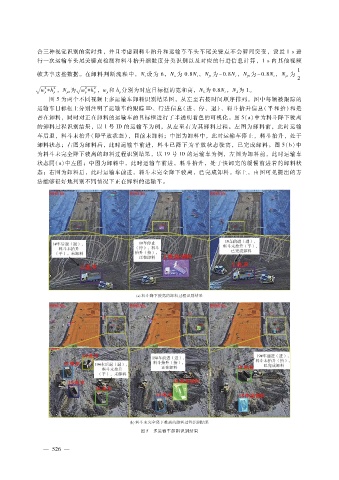
图 5为两个不同视频上多运输车卸料识别结果图,从左至右按时间顺序排列。图中每辆被跟踪的
运输车目标框上分别注明了运输车的跟踪 ID、行进信息(进、停、退)、料斗抬升信息(平和抬)和是
否在卸料,同时对正在卸料的运输车的目标框进行了半透明着色的可视化。图 5(a)中为料斗降下驶离
的卸料过程识别结果,以 1号 ID的运输车为例,从左至右为其卸料过程。左图为卸料前,此时运输
车后退,料斗未抬升(即平放状态),目前未卸料;中图为卸料中,此时运输车停止,料斗抬升,处于
卸料状态;右图为卸料后,此时运输车前进,料斗已降下为平放状态驶离,已完成卸料。图 5(b)中
为料斗未完全降下驶离的卸料过程识别结果,以 19号 ID的运输车为例,左图为卸料前,此时运输车
状态同( a)中左图;中图为卸料中,此时运输车前进,料斗抬升,处于快卸完的缓慢前进着的卸料状
态;右图为卸料后,此时运输车前进,料斗未完全降下驶离,已完成卸料。综上,由图可见提出的方
法能够很好地判别不同情况下正在卸料的运输车。
图 5 多运输车卸料识别结果
6
— 5 2 —