
Page 20 - 2023年第54卷第6期
P. 20
经过以上对智能冲毛装 备运 动学 模型的建 立 与 分 析 可 知,通 过 运 动 学 模 型 结 合 机 器 初 始 位 姿
(t)]。位姿信息可作为 ROS
[ x y θ ]可推算出任意时刻 t智能冲毛装备的姿态[x(t) y(t) θ 0
0 0 0 0
里程计的数据来源,里程计是衡量机器人从初始位姿到终点位姿的一个标准,可以提供智能冲毛装备
往特定方向的行进距离信息。
3.1.2 路径规划方法 冲毛仓面内分布斜拉钢筋固定桩、转梯等多种障碍物,需要根据工作区域、障
碍物位置,规划智能冲毛装备的作业路径,避免发生碰撞。通过获取仓面角点坐标、障碍物坐标,划
分作业条带,完成全局路径规划;根据 3.1.1节建立的运动学模型,通过对运动过程中的各个具体位
姿点采样,并根据采样得到运动轨迹,分析运行路径障碍物具体位置及其与智能冲毛装备的距离,实
现智能冲毛装备的动态避障和局部路径规划。
在世界坐标系中,设智能冲毛装备坐标参数集合为:
S = {x,y,l,b} (7)
0
0
T
式中:S为智能冲毛装备参数集合,l,b分别表示智能冲毛装备的长宽尺寸信息;x,y为智能冲毛
T 0 0
装备的位置,具体表达见式( 6)。
设仓面坐标参数集合为:
A
A
C
D
D
C
B
B
S = {A(x,y),B(x,y),C(x,y),D(x,y)} (8)
C 0 0 0 0 0 0 0 0
式中:S为仓面坐标集合;A,B,C,D为仓面角点在世界坐标系下的坐标边角点;AB为起点横缝,
C
CD为终点横缝。由于智能冲毛装备体积较大,仓面边界与作业区域之间需预留安全距离,设起点横
缝安全距离为智能冲毛装备长度 l,终点横缝位置的安全距离为 0.5l,上下游安全距离为智能冲毛装备
宽度 b。
设仓面障碍物坐标参数集合为:
m
m
n
2
1
1
n
2
S = {W (x,y),W (x,y),……,W (x,y),W (x,y)} (9)
0
0
1
0
2
0
n
m
0
0
W
0
0
n
n
式中:S 为仓面障碍物坐标参数集合,x,y分别表示障碍物中心在世界坐标系下的横坐标、纵坐标;
W 0 0
W 为第 n个障碍物;障碍物中心四周 1m的矩形区域(矩形四边与工作区域四边平行)作为障碍物
n
范围。
设相邻障碍物W ,W 在 AB方向上的距离为:
n
m
m
z = x- x n (10)
0 0
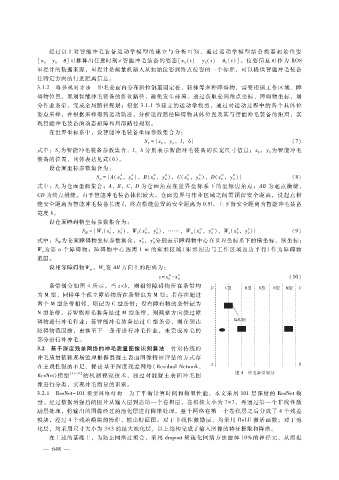
条带划分如图 4所示。当 z<b,则相邻障碍物所在条带均
为 M型,同样单个孤立障碍物所在条带也为 M型;若存在超过
两个 M型条带相邻,则记为 C型条带;没有障碍物的条带记为
N型条带。若智能冲毛装备经过 M型条带,则调整方向绕过障
碍物进行冲毛作业;若智能冲毛装备经过 C型条带,则在到达
障碍物范围前,更换至下一条带进行冲毛作业,未完成冲毛的
部分进行补冲毛。
3.2 基于深度残差网络的冲毛质量图像识别算法 针对传统的
冲毛质量依赖现场监理根据混凝土表面图像特征评估的方式存
在主观性强的不足,提出基于深度残差网络( ResidualNetwork,
ResNet)模型 [31 - 32] 的机器视觉技术,通过对混凝土表面冲毛图 图 4 冲毛条带划分
像进行分类,实现冲毛质量的识别。
3.2.1 ResNet - 101模型网络结构 为了平衡计算时间和模型性能,本文采用 101层深度的 ResNet模
型。经过数据增强后的图片从输入层到达第一个卷积层,卷积核大小为 7 × 7,再通过第一个非线性激
励层处理,将输出的图像经过的池化层进行降维处理。整个网络在第一个卷积层之后分成了 4个残差
模块,经过 4个残差模块的操作,输出特征图。对于非线性激励层,均采用 ReLU激活函数;对于池
化层,均采用尺寸大小为 3 × 3的最大池化层,以上结构完成了输入图像的特征提取和降维。
在上述的基础上,为防止网络过拟合,采用 dropout稀疏化网络方法滤掉 10%的神经元,从而提
8
— 6 4 —