
Page 17 - 2023年第54卷第6期
P. 17
机器人 [20 - 21] 、无人碾压机 [22 - 25] 等。在混凝土冲毛施工领域,胡从群等 [26] 将冲毛装置安设在小车上,
缓解了作业人员的劳动强度,改善了作业环境并保证了施工安全;乔雨等 [27] 发明了一种大坝仓面冲毛
装置,可以根据大坝仓面混凝土间歇时间及强度,选择不同冲毛方式,提升冲毛效果;闫利刚等 [28] 发
明了一种带进水净化过滤装置的高压水冲毛装备,可以减少水中的杂质对柱塞泵的磨损;周宜红等 [29]
通过三维激光扫描技术判断冲毛质量。上述研究成果实现了机器人技术在建筑施工领域的有益探索,
然而当前针对复杂环境下大坝混凝土冲毛作业过程,尚未有实现集自主路径规划和冲毛质量智能分析
功能于一体的冲毛作业系统的研究。为此,有必要开展满足混凝土坝复杂仓面施工环境下冲毛工艺的
机器人技术研究,解决传统冲毛施工方式面临的冲毛质量控制问题。
本文以混凝土坝仓面冲毛环节为研究对象,基于工业机器人、自动化控制、机器视觉等技术,进
行智能冲毛系统研发,以实现仓面复杂环境下自主行走、智能冲毛、自动回收等功能,以及仓面混凝
土冲毛质量的智能化判别。
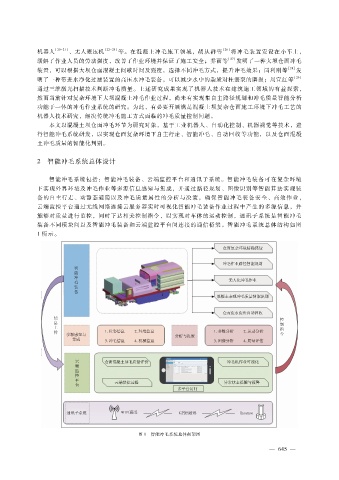
2 智能冲毛系统总体设计
智能冲毛系统包括:智能冲毛装备、云端监控平台和通讯子系统。智能冲毛装备可在复杂环境
下实现外界环境及冲毛作业等多源信息感知与集成,并通过路径规划、图像识别等智能算法实现装
备的自主行走、动静态避障以及冲毛质量属性的分析与决策,确保智能冲毛装备安全、高效作业,
云端监控平台通过无线网络连接云服务器实时可视化智能冲毛装备作业过程中产生的多源信息,并
能够对质量进行监控,同时下达相关控制指令,以实现对车体的运动控制,通讯子系统是智能冲毛
装备不同模块间以及智能冲毛装备和云端监控平台间连接的通信桥梁。智能冲毛系统总体结构如图
1所示。
图 1 智能冲毛系统总体框架图
— 6 4 5 —