
Page 18 - 2023年第54卷第6期
P. 18
2.1 智能冲毛装备结构设计 智能冲毛装备结构主
要包括行走模块、冲毛模块、供水模块、能源模块、
感知模块和机载控制器,可实现规定区域的无人冲
毛、仓面清扫以及废水废渣回收排放等功能。如图 2
所示。
( 1)行走模块。行走模块通过接受车体遥控器或
者云端监控平台下发的指令实现智能冲毛装备的启
动、行走、转弯、急停等功能。
( 2)冲毛模块。该模块是智能冲毛装备作业的核
图 2 智能冲毛装备结构图
心部件,在水平方向 上可 左右往 复运 动,竖直方向
上可自由调节冲毛枪离地高度及冲毛角度。
( 3)高压供水模块。该模块可自由调节供水管路输出水压,最大压力达到 50MPa,满足冲毛压力
不小于 25MPa要求,同时可综合考虑仓面混凝土早期强度迅速变化的问题,实现冲毛压力的智能
调节。
3
( 4)清扫回收模块。考虑到冲毛作业时每仓产生的废渣量可高达 1~2m ,该模块通过仓面清扫及
真空吸污装置回收仓面的废水废渣至回收箱中,从而提升冲毛作业的智能化与环水保控制水平。
( 5)能源模块。综合考虑智能冲毛终端工作时间长、多模块协同与灵活作业工作的需求,配备柴
油发动机以满足智能冲毛装备多模块、长历时能源需求。
(6)感知模块。车体上安装有多源传感器,包括采用基于北斗的高精度 GNSS定位终端、姿态传
感器等实现位姿的感知;采用高清相机实现冲毛状态智能感知;采用耦合以避障雷达为核心的多源传
感器实现仓面环境多尺度、动?静态障碍物与外部环境感知。结合自动驾驶技术,实现智能冲毛装备的
精确定位、导航、避障。
( 7)机载核心控制器。该模块为智能冲毛装备的核心载体,通过融合多源感知信息,基于智能算
法实现行走路径、冲毛质量、冲毛参数的智能分析与决策,并实现冲毛装备的智能化控制;同时机载
核心控制器与云端 控制平 台进 行双 向交互,实现智 能冲毛 装 备 参 数 的 实 时 上 传 与 云 端 平 台 指 令 的
获取。
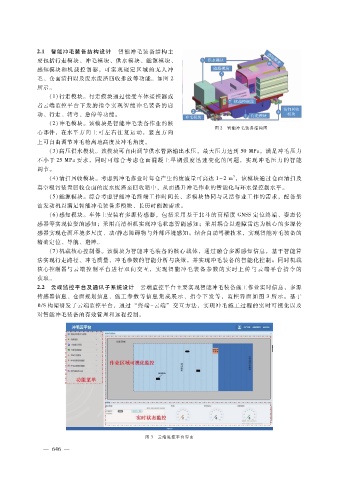
2.2 云端监控平台及通讯子系统设计 云端监控平台主要实现智能冲毛装备施工作业实时信息、多源
传感器信息、仓面规划信息、施工参数等信息集成展示、指令下发等,监控界面如图 3所示。基于
B?S构架研发了云端监控平台,通过 “终端 - 云端” 交互方法,实现冲毛施工过程的实时可视化以及
对智能冲毛装备的有效管理和远程控制。
图 3 云端监控平台界面
— 6 4 —
6