
Page 90 - 2024年第55卷第8期
P. 90
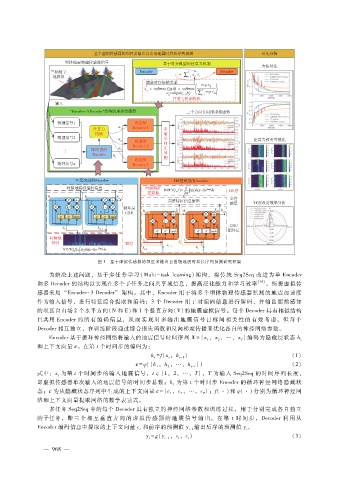
图 1 基于虚拟传感器的坝区多输出自由场地震时程长序列预测研究框架
为解决上述问题,基于多任务学习(Multi - tasklearning)架构,将传统 Seq2Seq改进为单 Encoder
和多 Decoder的结构以实现在多个子任务之间共享域信息,提高泛化能力和学习效率 [28] 。所提虚拟传
感器采用 “Encoder - 3Decoder” 架构。其中,Encoder用于将多个坝体物理传感器监测的地震加速度
作为输入信号,进行特征综合提取和编码;3个 Decoder用于对编码信息进行解码,并输出超前感知
的坝区自由场 2个水平方向(N和 E)和 1个竖直方向(V)的地震虚拟信号。每个 Decoder具有相似结构
且共用 Encoder的 所 有 编 码 信 息,从 而 实 现 对 多 输 出 地 震 信 号 目 标 间 相 关 性 的 有 效 考 虑。但 每 个
Decoder相互独立,在训练阶段通过综合损失函数和反向梯度传播来优化各自的神经网络参数。
Encoder基于循环神经网络将输入的地震信号时间序列 X= {x,x,…,x}编码为隐藏层状态 h t
T
1
2
和上下文向量 c。在第 t个时间步的编码为:
h= f(x,h ) (1)
t t t - 1
c = q({h,h,…,h }) (2)
1
2
t - 1
式中:x为第 t个时间步的输入地震信号,t ∈{1,2,…,T},T为输入 Seq2Seq的时间序列长度,
t
即虚拟传感器单次输入的地震信号的时间步总数;h为第 t个时间步 Encoder的循环神经网络隐藏状
t
态;c为从隐藏状态序列中生成的上下文向量 c = {c,c,…,c};f(·)和 q(·)分别为循环神经网
2
T
1
络和上下文向量提取网络的数学表达式。
多任务 Seq2Seq中的每个 Decoder具有独立的神经网络参数和训练过程,用于分别完成各自独立
的子任务,即 三 个 相 互 垂 直 方 向 的 虚 拟 传 感 器 的 地 震 信 号 输 出。在 第 t时 间 步, Decoder利 用 从
Encoder编码信息中提取的上下文向量 c和前序的预测值 y 输出后序的预测值 y。
t
t
t - 1
y= g(y ,s,c) (3)
t t - 1 t t
— 9 6 —
8