
Page 126 - 2024年第55卷第10期
P. 126
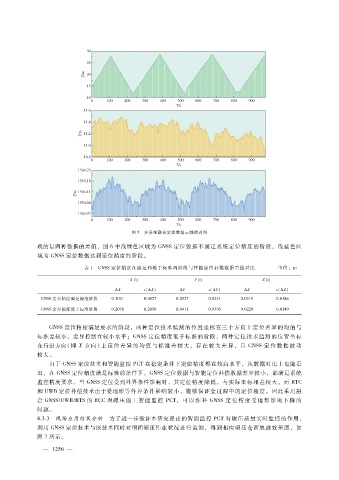
图 5 多系统融合定位数据三轴散点图
现的是两种数据的差值,图 6中浅绿色区域为 GNSS定位数据不满足系统定位精度的阶段,浅蓝色区
域为 GNSS定位数据达到定位精度的阶段。
表 1 GNSS定位精度在满足和低于标准两阶段与智能定位补偿数据差值对比 单位:m
X向 Y向 Z向
Δ X s( Δ X) Δ Y s( Δ Y) Δ Z s( Δ Z)
GNSS定位精度满足标准阶段 0.1021 0.0827 0.0527 0.0431 0.0218 0.0186
GNSS定位精度低于标准阶段 0.2078 0.2050 0.0411 0.0305 0.0220 0.0149
GNSS定位精度满足要求的阶段,两种定位技术监测的位置坐标在三个方向上定位差异的均值与
标准差较小,差异控制在较小水平;GNSS定位精度低于标准的阶段,两种定位技术监测的位置坐标
在行进方向(即 X方 向)上定 位差异 的均 值 与标准差 较 大,存 在 较 大 差 异,且 GNSS定 位 数 据 波 动
较大。
由于 GNSS定位技术和智能监控 PCT在稳定条件下定位精度都在较高水平,从数据对比上也能看
出,在 GNSS定位精度满足标准的条件下,GNSS定位数据与智能定位补偿数据差异较小,都满足系统
监控精度要求。当 GNSS定位受到外界条件影响时,其定位精度降低,与实际坐标相差较大。而 RTC
和 UWB定位补偿技术由于受地形等外界条件影响较小,能够保证全过程中的定位精度。因此采用融
合 GNSS?UWB?RTS的 RCC坝碾 压施 工智能监 控 PCT,可 以 弥 补 GNSS定 位 精 度 受 地 形 影 响 下 降 的
问题。
4.3.3 现场应用结果分析 为了进一步验证本研究提出的智能监控 PCT对碾压质量实时监控的作用,
利用 GNSS定位技术与该技术同时对坝面碾压作业状况进行监测,得到相应碾压仓面轨迹效果图,如
图 7所示。
5
— 1 2 6 —