
Page 123 - 2024年第55卷第10期
P. 123
预测的新息值与实际观测值得到的新息值之间的差值是否在允许范围之内作为确定的依据,如果 GNSS
g
g
u
u
和 UWB定位精度均满足要求(der ≤φ,der ≤φ),则使用耦合 GNSS和 UWB的定位数据中新息值误差
k k
最小者作为原始数据进行监测。同时,如果碾压机有 RTS跟踪定位,则会停止 RTS定位,关闭 RTS。
g
g
u
u
( 3)当 GNSS观测数据不满足精度要求(der> φ),UWB观测数据满足精度要求时(der ≤φ),使
k
k
g
g
用 UWB观测数据作为原始数据进行监测;当 GNSS观测数据满足要求(der ≤φ),UWB观测数据不
k
u
u
满足要求时( der> φ),使用 GNSS观测数据作为原始数据进行监测。
k
g
u
g
u
( 4)当 GNSS和 UWB观测数据均无法满足精度要求时(der> φ,der> φ),启用 RTS系统,使用
k
k
RTS定位数据作为原始数据进行监测。首先需判断当前 RTS系统是否处于工作追踪定位状态,若具有
RTS跟踪定位,则直接采用 RTS观测数据作为原始数据进行检测;若 RTS系统处于关闭状态,则启动
RTS追踪定位,搜索施工机械放置的全站仪棱镜,开始追踪定位。
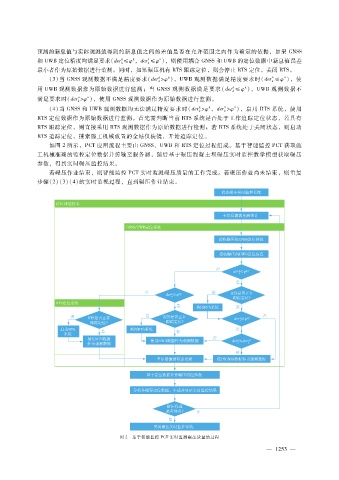
如图 2所示,PCT应用流程主要由 GNSS、UWB和 RTS定位过程组成。基于智能监控 PCT获取施
工机械准确的监控定位数据并传输至服务器,随后基于碾压混凝土坝碾压实时监控数学模型获取碾压
参数,得到实时碾压监控结果。
若碾压作业结束,则智能监控 PCT实时监测碾压质量的工作完成。若碾压作业尚未结束,则重复
步骤( 2)(3)(4)的实时监视过程,直到碾压作业结束。
图 2 基于智能监控 PCT实时监测碾压质量的过程
— 1 5 3 —
2