
Page 119 - 2024年第55卷第10期
P. 119
信技术,具有良好的抗多 径干扰 能力 和厘 米 级的 距 离 分 辨 率,适 用 于 密 集 多 径 场 景。因 此,UWB
技术能够较好地 弥 补 GNSS在 受 限 环 境 下 精 度 不 足 的 劣 势,维 持 定 位 功 能 的 可 用 性。然 而,相 较
RTS,UWB定位精度相对较低。RTS是 一 种 集 光 学、机 械 和 电 气 技 术 于 一 体 的 高 科 技 现 代 测 量 仪
器,由于其高精度、高效率和易用性,已被广泛应用于水利水电 工程 建设 [11 - 14] 中。但 RTS定位主
要适用于静态测量,且其光线通视性易受坝面条件干扰打断,不适于施工机械的连续动态定位测量
应用。因此,当坝面个别区域高度遮挡或极端气候条件导致卫星信号受限,进而导致系统过度依赖
UWB数据时,RTS系统可作为应急 保 障,补 偿 UWB系 统 定 位 精 度 不 足 的 缺 陷。综 上 所 述,UWB
能够弥补 GNSS信号缺失时定位精度下降的不足,同时 UWB与 RTS又形成了在定位连续性与定位
精度上的优势互补,因此将 UWB与 RTS作为 GNSS系统的补偿系统,能够实现不同传感器的优势
互补,提高定位精度。
卡尔曼滤波是一种常用的数据融合算法,被广泛应用于多种定位系统的数据耦合研究中 [15 - 21] 。由
于滤波过程中的状态数据能够直观的反应系统及观测值的误差状态,研究人员基于卡尔曼滤波算法,
提出了众多处理滤波过程中异常数据的自适应滤波算法。如部分研究将其他滤波算法与卡尔曼滤波算
法结合使用 [22 - 23] ,此类算法的稳定性较强,但额外算法的引入增大了系统的运算量与复杂性。滤波过
程中的误差协方差反映了卡尔曼滤波对观测值误差状况的拟定,因此部分研究通过对误差协方差的调
整以应对异常值的干扰 [24 - 26] 。在通常工况下,误差协方差变化较小时,对误差协方差的频繁调整会造
成算力的浪费,仅当系统受到异常干扰时,误差状况发生突变时,调整误差协方差才具备较高价值,
因此部分研究将异常值检测引入滤波过程,仅对异常值进行处理 [27 - 29] 。新息值是卡尔曼滤波过程中产
生的状态信息,能够直接反应观测值与理论值的差异,当系统出现异常时,新息值会出现异常波动。
因此,本研究运用卡尔曼滤波算法,基于新息值的统计信息,利用最小二乘法拟合新息值的变化,根
据新息值阈值选择最优观测值,对 UWB、RTS与 GNSS定位数据进行处理与耦合,并根据新息值统计
信息来衡量观测器的准确性,以实现定位精度的最优化。
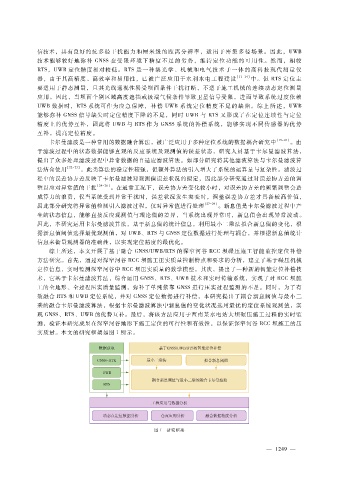
综上所述,本文开展了基于融合 GNSS?UWB?RTS的深窄河谷 RCC坝碾压施工智能监控定位补偿
方法研究。首先,通过对深窄河谷 RCC坝施工压实质量控制特点和要求的分析,建立了基于碾压机械
定位信息,实时监测深窄河谷中 RCC坝压实质量的数学模型。其次,提出了一种新的智能定位补偿技
术,它基于卡尔曼滤波算法,综合运用 GNSS、RTS、UWB技术和实时传输系统,实现了对 RCC坝施
工的全地形、全过程压实质量监测,弥补了单纯依靠 GNSS进行压实过程监测的不足。同时,为了有
效融合 RTS和 UWB定位系统,并对 GNSS定位数据进行补偿,本研究提出了耦合新息阈值与最小二
乘的融合卡尔曼滤波算法,根据卡尔曼滤波算法中新息值的变化状况选用最优的定位系统观测值,实
现 GNSS、RTS、UWB的优势互补。最后,将该方法应用于西南某水电站大坝碾压施工过程的实时监
测,验证本研究成果在深窄河谷地形下施工定位的可行性和有效性,以保证深窄河谷 RCC坝施工的压
实质量。本文的研究框架如图 1所示。
图 1 研究框架
2
— 1 4 9 —