
Page 47 - 2024年第55卷第10期
P. 47
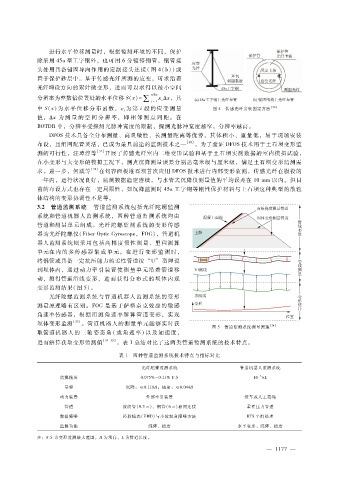
进行水平位移测量时,根据监测环境的不同,保护
除采用 45a型工字钢外,也可用 6分镀锌钢管,钢管接
头处用具备锚固导向作用的定制接头连接(图 4(b))或
置于保护砂层中。基于传感光纤所测的应变,可求沿着
光纤埋设方向的累计微变形,进而可以求得以最小空间
x? Δ x
分辨率为整数倍位置处的水平位移 S(x) = ε i Δ x,其
i
∑ =1
为 第 i段 的应变测 量 图 4 传感光纤安装固定方法 [30]
中 S(x)为水平位移分 布函 数,ε i
值,Δ x为 测 量 的 空 间 分 辨 率,即 相 邻 测 点 间 距。 在
BOTDR中,分辨率受探测光脉冲宽度的限制,探测光脉冲宽度越窄,分辨率越高。
DFOS技术具备全分布测量、高灵敏性、长测量距离等优势,其体积小、重量低,易于现场安装
布设,且组网配置灵活,已成为最具前途的监测技术之一 [30] 。为了验证 DFOS技术用于土石坝变形监
测的可行性,汪璋淳等 [31] 开展了传感光纤室内二维变形试验和基于土石坝实测数据的室内模拟试验,
在小变形与大变形的模拟工况下,测点沉降测量误差分别达毫米级与厘米级,满足土石坝变形监测需
求。进一步,何斌等 [32] 在句容面板堆石坝首次应用 DFOS技术进行内部变形监测,传感光纤在服役的
一年内,运行状况良好,监测数据稳定连续,与水管式沉降仪测量值的平均误差在 10mm以内。但目
前的布设方式也存在一定局限性,如沉降监测时 45a工字钢等刚性保护材料与土石坝这种典型的散粒
体结构的变形协调性不足等。
3.2 管道监测系统 管道监测系统包括光纤陀螺监测
系统和管道机器人监测系统,两种管道监测系统均由
管道和测量单元组成。光纤陀螺监测系统的变形传感
器为光纤陀螺仪( FiberOpticGyroscope,FOG),管道机
器人监测系统则采用包括高精度惯性测量、里程测算
单元在 内 的 多 传 感 器 集 成 单 元。在 进 行 变 形 监 测 时,
将钢管或具备一定抗压能力的柔性管道按 “U” 型埋设
到坝体内,通过动力牵引装置使测量单元沿着管道移
动,测得管道沿线变 形,进 而获 得分布 式 的坝 体内观
变形监测结果(图 5)。
光纤陀螺监测系统与管道机器人监测系统的变形
测量原理略有区别。FOG是基于萨格奈克效应的敏感
角速率传感器,根据 所测 角速率 解算 管道 变形,实现
坝体变形监测 [33] 。管道机器人的测量单元能够实时获
图 5 管道监测系统测量原理 [34]
取管道机 器 人的 三轴 姿态角 (或 角速率)以 及加速 度,
进而解算获取变形监测值 [34 - 35] 。表 1总结对比了这两类管道监测系统的技术特点。
表 1 两种管道监测系统技术特点与指标对比
光纤陀螺监测系统 管道机器人监测系统
- 5
监测精度 0.075%~0.11% F.S 10 × L
量程 沉降:≤0.118H;挠度:≤0.044H
动力装置 外部牵引装置 绞车或人工拉绳
管道 波纹管(0.3m)、钢管(6m)相间连接 柔性压力管道
数据降噪 经验模态(EMD)与小波混合降噪方法 RTS平滑处理
监测功能 沉降、挠度 水平变形、沉降、挠度
注:F.S为变形监测最大范围,H为坝高,L为管道长度。
1
— 1 7 7 —