
Page 48 - 2024年第55卷第10期
P. 48
蔡德所等 [36] 于 2004年首次将光纤陀螺监测系统应用于思安江面板堆石坝的面板挠度测量,后进
一步应用于水布垭面板堆石坝 [37] 。与其他面板扰度监测技术相比,光纤陀螺监测系统具有灵敏度高、
抗干扰性强、测量精度高等优点。Liao等 [38] 将光纤陀螺监测系统应用于猴子岩堆石坝内部沉降监测,
该系统主要由监测管道、载有 FOG和数据记录器的监测小车及牵引装置组成。该系统的变形监测结果
与水管式沉降仪基本一致,验证了其用于土石坝内部变形监测的可行性。
何斌等 [39] 于 2015年提出了基于管道机器人监测系统的土石坝内观变形监测技术,并进行 1∶1等
比尺模型试验,沉降与水平变形监测精度分别为 0.523与 1.034mm。Chen等 [34] 与殷煜等 [35] 用柔性管
道替代刚性管道,并通过高精度多传感器结合数据融合方法,进行监测数据解算,提升了管道机器人
5
监测系统性能,并将其应用于夹岩面板堆石坝和两河口心墙堆石坝,其监测误差约为管线长的 1?10。
管道监测系统也存在管道埋设影响大坝填筑、耗时费力等问题,管径较大时对坝体结构存在一定影
响。管径大小主要由测量单元尺寸决定,因此需进一步研制尺寸更小、更精密的测量单元,提高管道
监测系统的适用性。
3.3 阵列式位移计 SAA SAA在土石坝变形监测中
常被称作阵列式位移计、柔性测斜仪或柔性智能位
移计等。Bennett等 [40] 在 2007年首次进行了 SAA的
相关研究,并将其应用于边坡变形监测。SAA主要
由高精度电容式 MEMS加速度计、刚性硬管、柔性
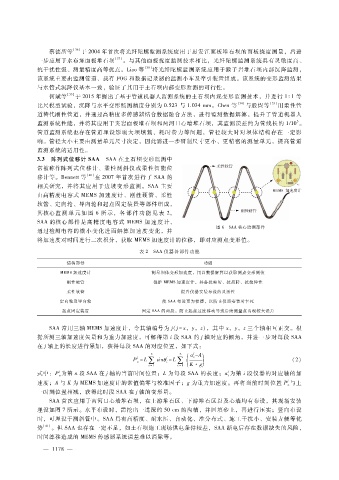
软管、定向轮、导向轮和起点固定装置等部件组成,
其核心监 测 单 元 如 图 6所 示,各 部 件 功 能 见 表 2。
SAA的核心 部 件 是高 精度电 容 式 MEMS加 速 度 计,
图 6 SAA核心监测部件
通过检测电容的微小变化进而解算加速度变化,并
将加速度对时间进行二次积分,获取 MEMS加速度计的位移,即对应测点变形值。
表 2 SAA仪器各部件功能
结构部件 功能
MEMS加速度计 测量坝体变形加速度,用以数据解算以获取测点变形测值
刚性硬管 保护 MEMS加速度计,具备抗剪切、抗扭转、抗拉伸性
柔性软管 提升仪器安装布设的灵活性
定向轮及导向轮 使 SAA布设更为便捷,以防止仪器安装时卡死
起点固定装置 固定 SAA的两段,防止起点过度移动导致后续测量点出现较大误差
SAA常用三轴 MEMS加速度计,令其轴编号为 j(j = x,y,z),其中 x,y,z三个轴相互正交。根
据所测三轴加速度矢量和为重力加速度,可解得第 i段 SAA的 j轴对应的倾角,并进一步对每段 SAA
在 j轴上的长度进行累加,获得每段 SAA的对应位置,如下式:
j
n n a- A
i
j
j
n ∑
P = L sin θ i ∑ ( ) (2)
= L
i =1 i =1 K·g
j
j
式中:P为第 n段 SAA在 j轴的当前时间位置;L为每段 SAA的长度;a为第 i段仪器的对应轴的加
n i
j
速度;A与 K为 MEMS加速度计的常值偏零与校准因子;g为重力加速度。再将当前时刻位置 P与上
n
一时刻位置相减,获得此时段 SAA在 j轴的变形量。
SAA首次应用于两河口心墙堆石坝,在上游堆石区、下游堆石区以及心墙均有布设,其现场安装
埋设如图 7所示。水平布设时,需挖出一道深约 50cm的沟槽,并回填砂土,再进行压实;竖向布设
时,可埋设于测斜管中。SAA具有高精度、耐水压、自动化、准分布式、施工干扰小、安装方便等优
势 [41] 。但 SAA也存在一定不足,如土石坝施工现场供电条件较差,SAA断电后存在数据缺失的风险,
时间漂移造成的 MEMS传感器系统误差难以消除等。
— 1 1 8 —
7