
Page 64 - 2022年第53卷第3期
P. 64
上三角上的图是 3 个权重系数的二维散点图,分析可知 W 和 W ,W 和 W 间的负相关性较高,相关系
1 2 1 3
数分别为-0.46 和-0.82,而 W 和 W 间的相关性较小,相关系数仅为-0.13。表 2 展示了各测点组合代
2 3
理模型的权重系数分布函数的最大后验概率估计值、均值和标准差,可以明显看出,对于每个测
点,SVR 的权重均值都比 Kriging 和 MARS 的大,说明 SVR 的预测性能最佳。同时,每个测点上 SVR
的权重标准差均比 Kriging 和 MARS 的稍大,说明 SVR 权重系数的不确定性也比 Kriging 和 MARS 的稍
大。取权重系数分布函数的最大后验概率估计值为权重系数的最终取值,通过加权求和,从而实现
组合代理模型的构建。
4.2 贝叶斯反演分析 将 4.1 节中建立的组合代理模型耦合到贝叶斯参数反演方法中,然后对 6 个覆
盖层的渗透系数进行反演分析。待反演渗透系数的先验分布设置为均匀分布,其取值范围如表 1 所
示。然后,采用 DREAM 算法评估待反演渗透系数的后验概率密度函数。其中,DREAM 算法的平
ZS ZS
行链设置为 4 条,迭代次数设为 10 000 次。前 6000 次迭代作为“燃烧期”,取后 4000 次迭代计算的样
本评估待反演渗透系数的后验概率密度函数。
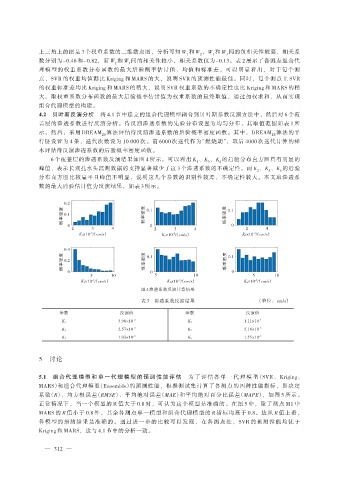
6 个覆盖层的渗透系数反演结果如图 4 所示。可以看出 K 、K 、K 的后验分布直方图具有明显的
1 3 4
峰值,表示长观孔水头监测数据的支持显著减少了这 3 个渗透系数的不确定性。而 K 、K 、K 的后验
2 5 6
分布直方图比较扁平且峰值不明显,说明这几个参数的识别性较差,不确定性较大。本文取渗透系
数的最大后验估计值为反演结果,如表 3 所示。
0.2
概率密度 0.1 概率密度 0.1 概率密度 0.1
0 0 0
2 3 4 2 3 4 2 4
K 1×10 /(cm/s) K 2×10 /(cm/s) K 3×10 /(cm/s)
-3
-2
-2
0.4
概率密度 0.2 概率密度 0.1 概率密度 0.1
0 0 0
5 10 5 10 5 10
K 4×10 /(cm/s) K 5×10 /(cm/s) K 6×10 /(cm/s)
-2
-3
-4
图 4 渗透系数反演计算结果
表 3 渗透系数反演结果 (单位:cm/s)
参数 反演值 参数 反演值
3.98×10 -2 1.11×10 -4
K 1 K 4
2.57×10 -2 5.18×10 -3
K 2 K 5
-3 -2
K 3 1.03×10 K 6 1.55×10
5 讨论
5.1 组 合 代 理 模 型 和 单 一 代 理 模 型 的 预 测 性 能 评 估 为 了 评 估 各 单 一 代 理 模 型(SVR、 Kriging、
MARS)和组合代理模型(Ensemble)的预测性能,根据测试集计算了各测点的四种性能指标,即决定
系数(R)、均方根误差(RMSE)、平均绝对误差(MAE)和平均绝对百分比误差(MAPE),如图 5 所示。
正常情况下,当一个模型的 R 值大于 0.8 时,可认为这个模型是准确的。在图 5 中,除了测点 M1 中
MARS 的 R 值小于 0.8 外,其余各测点单一模型和组合代理模型的 R 指标均高于 0.8。故从 R 值上看,
各模型的预测结果是准确的。通过进一步的比较可以发现,在各测点处,SVR 的预测性能均优于
Kriging 和 MARS,这与 4.1 节中的分析一致。
— 312 —