
Page 31 - 2022年第53卷第12期
P. 31
系统来实现。
在高心墙堆石坝碾压施工过程中,精确感知质量、位姿和环境信息,动态优化碾压参数并对碾压
机进行精准控制是保证碾压施工质量、提升碾压施工效率的重要环节。因此,本研究建立的高心墙堆
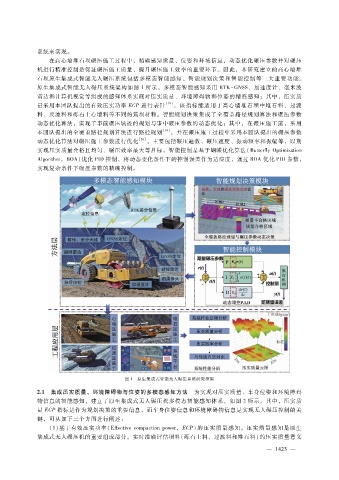
石坝原生集成式智能无人碾压系统包括多模态智能感知、智能规划决策和智能控制等三大重要功能。
原生集成式智能无人碾压系统架构如图 1所示。多模态智能感知采用 RTK - GNSS、加速度计、毫米波
雷达和计算机视觉等组成的感知体系实现对压实质量、环境障碍物和位姿的精准感知;其中,压实质
量采用本团队提出的有效压实功率 ECP进行表针 [19] ,该指标能适用于高心墙堆石坝中堆石料、过渡
料、反滤料和砾石土心墙料等不同的筑坝材料。智能规划决策集成了全覆盖路径规划算法和碾压参数
动态优化算法,实现了事前碾压轨迹的规划与事中碾压参数的动态优化;其中,在碾压施工前,采用
本团队提出的全覆盖路径规划算法进行路径规划 [14] ,并在碾压施工过程中采用本团队提出的碾压参数
动态优化算法对碾压施工参数进行优化 [20] ,主要包括碾压遍数、碾压速度、振动频率和振幅等,以期
实现压实质量合格且均匀、碾压效率最大等目标。智能控制是基于蝴蝶优化算法(ButterflyOptimization
Algorithm ,BOA)优化 PID控制,将动态变化条件下的控制误差作为适应度,通过 BOA优化 PID参数,
实现复杂条件下碾压参数的精确控制。
图 1 原生集成式智能无人碾压系统研究框架
2.1 集成压实质量、环境障碍物与位姿的多模态感知方法 为实现对压实质量、车身位姿和环境障碍
物信息的智能感知,建立了原生集成式无人碾压机多模态智能感知体系,如图 2所示。其中,压实质
量 ECP指标是作为规划决策的重要信息,而车身位姿信息和环境障碍物信息是实现无人碾压控制的关
键,可从如下三个方面进行阐述:
( 1)基于有效压实功率(Effectivecompactionpower,ECP)的压实质量感知。压实质量感知是原生
集成式无人碾压机的重要组成部分。实时准确评估坝料(砾石土料、过渡料和堆石料)的压实质量意义
4
— 1 2 3 —