
Page 32 - 2022年第53卷第12期
P. 32
重大且极具挑战。考虑到坝料压实质量与压实能量密切相关,原生集成式智能无人碾压采用本研究团
队提出的有效压实功率 ECP指标评估土工材料压实质量 [19] 。ECP指标是基于能量守恒原理对钢轮的
行走系统、振动系统、传动系统进行动力学建模,计算碾压机在碾压过程中的功率损耗,从而分析出
作用于坝料的有效压实功率。ECP计算公式如式(1)所示:
(
2
2
2 2
ECP = P- 2 πf(cA+ cA) - MgVsin α + (1 + ζ ) a ) - ( ξ V + b) (1)
g 1 x 3 y g
式中 ECP参数分为两种类型:系统参数和动态参数。系统参数与碾压机车体相关,可查阅碾压机的参
数手册获得,包括 c、c、ζ 、M、g、ξ 、b。其中,c和 c分别为碾轮的横向和纵向阻尼;ζ 为内部零
1 3 1 3
2
件的能量消耗系数;M为车体质量,kg;g为重力加速度,m?s;ξ 和 b为传动系统的能量损失系数。
动态参数与碾压施工过程相关,可通过实时监控系统测量得到,包括 P、f、A、A、α 、a和 V。其
x
g
y
中,P为发动机总功率,W;f为振动频率;A为横向振动幅度,m;A为纵向振动幅度,m;α为碾
g x y
2
压机俯仰角度,( °);a为碾压机移动加速度,m?s;V为车速,km?h。本研究团队提出的 ECP指标已
被证明与粗粒料(如堆石料、过渡料)和细粒料(如心墙材料)的碾压遍数和压实质量密切相关 [19] ,能
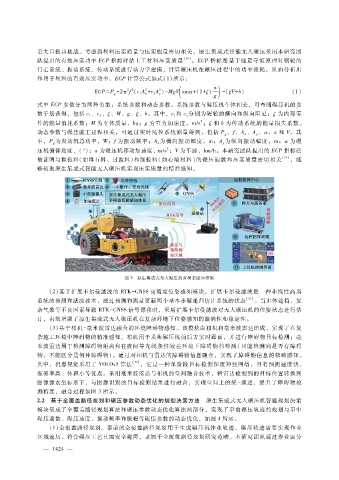
够辅助原生集成式智能无人碾压机实现压实质量的精准感知。
图 2 原生集成式无人碾压机多模态感知框架
(2)基于扩展卡尔曼滤波的 RTK - GNSS高精度位姿感知模块。扩展卡尔曼滤波是一种非线性高斯
系统的预测和滤波技术,通过预测和测量更新两个基本步骤递归估计系统的状态 [21] 。当山体遮挡、复
杂气象等不良因素导致 RTK - GNSS信号漂移时,采用扩展卡尔曼滤波对无人碾压机的位姿状态进行估
计,有效增强了原生集成式无人碾压机在复杂环境下位姿感知的准确性和稳定性。
(3)基于相机- 毫米波雷达融合的环境障碍物感知。该模块由相机和毫米波雷达组成,实现了在复
杂施工环境中障碍物的精准感知。相机用于采集碾压机前后方实时画面,并进行障碍物目标检测;毫
米波雷达用于检测障碍物距离和在夜间等光线条件较差环境下障碍物的检测(只能检测到是否有障碍
物,不能区分是何种障碍物)。通过对相机与雷达的障碍物信息融合,实现了障碍物信息的精确感知。
其中,机器视觉采用了 YOLOv5算法 [22] ,它是一种单阶段目标检测深度神经网络,具有预测速度快、
准确率高、体积小等优点。采用毫米波雷达与相机的空间融合技术,将雷达检测到的目标位置转换到
图像像素坐标系下,与图像识别的目标检测结果进行融合,实现空间上的统 - 描述,提升了障碍物检
测精度,融合过程如图 3所示。
2.2 基于全覆盖路径规划和碾压参数动态优化的规划决策方法 原生集成式无人碾压机智能规划决策
模块集成了全覆盖路径规划算法和碾压参数动态优化算法两部分,实现了事前碾压轨迹的规划与事中
碾压遍数、碾压速度、振动频率和振幅等碾压参数的动态优化,如图 4所示。
(1)全覆盖路径规划。事前的全覆盖路径规划用于生成碾压机作业轨迹。碾压轨迹需要实现作业
区域遍历、符合碾压工艺且需安全避障,隶属于全覆盖路径规划研究范畴。本研究团队通过作业面分
2
— 1 4 4 —