
Page 35 - 2022年第53卷第12期
P. 35
t
t
t
t
第 i只蝴蝶的香味感知量;x,x,x分别为第 i、j、k只蝴蝶在第 t代的位置;b为常数;c为第 t代的
i j k
值,N 为最大迭代次数。所提出算法的流程如图 6所示。
gen
图 6 BOA - PID控制算法流程图
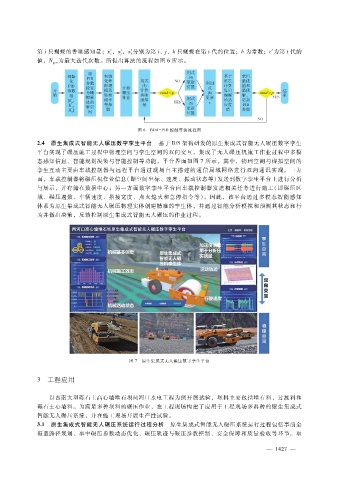
2.4 原生集成式智能无人碾压数字孪生平台 基于 B?S架构研发的原生集成式智能无人碾压数字孪生
平台实现了碾压施工过程中物理空间与孪生空间的双向交互,集成了无人碾压机施工作业过程中多模
态感知信息、智能规划决策与智能控制等功能,平台界面如图 7所示。其中,物理空间与虚拟空间的
孪生互动主要由车载控制器与远程平台通过现场自主搭建的通信局域网络进行双向通讯实现。一方
面,车载控制器将碾压机作业信息(即空间坐标、速度、振动状态等)发送到数字孪生平台上进行分析
与展示,并存储在数据中心;另一方面数字孪生平台向车载控制器发送相关任务进行施工(即碾压区
域、碾压遍数、车辆速度、搭接宽度、点火熄火和急停指令等)。因此,该平台通过多模态智能感知
体系为原生集成式智能无人碾压物理实体创建精准的孪生体,并通过智能分析模拟和预测其状态和行
为并做出决策,反馈控制原生集成式智能无人碾压的作业过程。
图 7 原生集成式无人碾压数字孪生平台
3 工程应用
以西南大型砾石土高心墙堆石坝两河口水电工程为例开展试验,坝料主要包括堆石料、过渡料和
砾石土心墙料。为满足多种坝料的碾压作业,在工程现场构建了应用于工程现场多料种的原生集成式
智能无人碾压系统,并在施工现场开展生产性试验。
3.1 原生集成式智能无人碾压系统运行过程分析 原生集成式智能无人碾压系统运行过程包括事前全
覆盖路径规划、事中碾压参数动态优化、碾压轨迹与碾压参数控制、安全保障和质量验收等环节。取
4
— 1 2 7 —