
Page 38 - 2022年第53卷第12期
P. 38
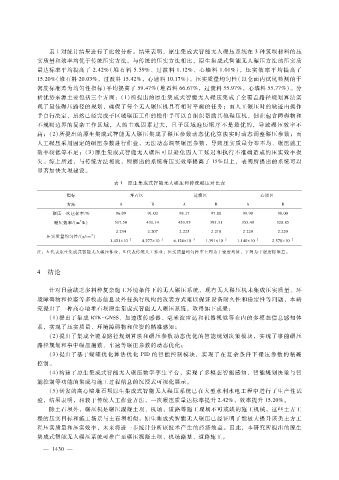
表 1对统计结果进行了比较分析。结果表明,原生集成式智能无人碾压系统在 3种筑坝材料的压
实质量和效率均优于传统压实方法。与传统的压实方法相比,原生集成式智能无人碾压方法的压实质
量达标率平均提高了 2.42%(堆石料 5.59%、过渡料 1.12%、心墙料 1.01%),压实效率平均提高了
15.20%(堆石料 20.03%,过渡料 15.42%,心墙料 10.17%),压实质量均匀性(以仓面内试坑检测的干
密度标准差为均匀性指标)平均提高了 59.47%(堆石料 66.67%,过渡料 55.97%,心墙料 55.77%)。分
析优势来源主要包括三个方面:( 1)所提出的原生集成式智能无人碾压集成了全覆盖路径规划算法实
现了最佳碾压路径的规划,确保了每个无人碾压机具有相对平衡的任务;而人工碾压时的轨迹由操作
手自行决定,虽然已经完成子区域碾压工作的操作手可以自组织帮助其他碾压机,但在包含障碍物和
不规则边界的复杂工作区域,人的主观因素过大,且子区域遍历顺序不是最优的,导致碾压效率不
高;( 2)所提出的原生集成式智能无人碾压集成了碾压参数动态优化算法实时动态调整碾压参数;而
人工碾压采用固定的碾压参数进行作业,无法动态调整碾压参数,导致压实质量分布不均、碾压施工
效率较低等不足;( 3)原生集成式智能无人碾压可以避免因人工延迟和执行不准确造成的压实效率损
失。综上所述,与传统方法相比,所提出的系统将压实效率提高了 15%以上,表明所提出的系统可以
显著加快大坝建设。
表 1 原生集成式智能无人碾压和传统碾压对比表
指标 堆石区 过渡区 心墙区
方法 A B A B A B
碾压一次达标率?% 96.09 91.00 98.17 97.00 99.90 99.00
2
碾压效率?(m ?h) 517.50 431.14 453.95 393.31 353.48 320.85
2.234 2.207 2.225 2.218 2.229 2.220
3
压实质量均匀性?(g?cm )
1.421 × 10 - 2 4.277 × 10 - 2 6.124 × 10 - 3 1.391 × 10 - 2 1.140 × 10 - 2 2.578 × 10 - 2
注:A代表原生集成式智能无人碾压作业,B代表传统人工作业;压实质量均匀性中上列为干密度均值,下列为干密度标准差。
4 结论
针对目前缺乏多料种复杂施工环境条件下的无人碾压系统、现有无人碾压机未集成压实质量、环
境障碍物和位姿等多模态信息及外挂执行机构的改装方式难以保证设备耐久性和稳定性等问题,本研
究提出了一种高心墙堆石坝原生集成式智能无人碾压系统,取得如下成果:
( 1)提出了集成 RTK - GNSS、加速度传感器、毫米波雷达和机器视觉等在内的多模态信息感知体
系,实现了压实质量、环境障碍物和位姿的精准感知;
( 2)提出了集成全覆盖路径规划算法和碾压参数动态优化的智能规划决策模块,实现了事前碾压
路径规划和事中碾压遍数、车速等碾压参数的动态优化;
( 3)提出了基于蝴蝶优化算法优化 PID的智能控制模块,实现了在复杂条件下碾压参数的精确
控制。
( 4)构建了原生集成式智能无人碾压数字孪生平台,实现了多模态智能感知、智能规划决策与智
能控制等功能的集成与施工过程信息的沉浸式可视化展示。
( 5)研发的高心墙堆石坝原生集成式智能无人碾压系统已在大型水利水电工程中进行了生产性试
验,结果表明,相较于传统人工作业方法,一次碾压质量达标率提升 2.42%,效率提升 15.20%。
除土石坝外,碾压机是碾压混凝土坝、机场、道路等施工现场不可或缺的施工机械。这些土方工
程的压实目标和施工场景与土石坝相似。原生集成式智能无人碾压已经证明了能极大提升该类土方工
程压实质量和压实效率,未来将进一步统计分析该技术产生的经济效益。因此,本研究所提出的原生
集成式智能无人碾压系统可推广至碾压混凝土坝、机场路基、道路施工。
3
— 1 4 0 —