
Page 33 - 2022年第53卷第12期
P. 33
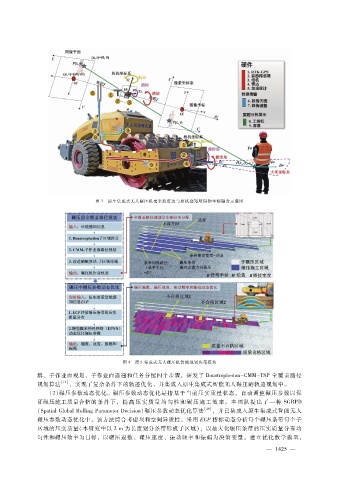
图 3 原生集成式无人碾压机毫米波雷达与相机感知障碍物坐标融合示意图
图 4 原生集成式无人碾压机智能规划决策模块
解、子作业面规划、子作业面连通和任务分配四个步骤,研发了 Boustrophedon - CMM- TSP全覆盖路径
规划算法 [14] ,实现了复杂条件下的轨迹优化,并集成入原生集成式智能无人碾压的轨迹规划中。
(2)碾压参数动态优化。碾压参数动态优化是指基于当前压实质量状态,自动调整碾压参数以保
证碾压施工质量合格的 条 件 下,提 高 压 实 质 量 均 匀 性 和 碾 压 施 工 效 率。本 团 队 提 出 了 一 种 SGRPD
(SpatialGlobalRollingParameterDecision)碾压参数动态优化算法 [20] ,并已集成入原生集成式智能无人
碾压参数动态优化中。该方法综合考虑坝料空间异质性,采用 ECP指标动态分析每个碾压条带每个子
区域的压实质量(本研究中以 2m为长度划分条带形成子区域),以最大化碾压条带的压实质量分布均
匀性和碾压效率为目标,以碾压遍数、碾压速度、振动频率和振幅为决策变量,建立优化数学模型,
4
— 1 2 5 —