
Page 87 - 2022年第53卷第3期
P. 87
据,由此拟定安全监控指标 E 为:
m
E = E ± Δ (5)
m
但该方法存在明显不足。资料系列不同,分析计算结果的标准差 S 也不同,i 也不相同,使得置
信带Δ=±iS 有一定的任意性,而且没有反映工程的重要性(等级和级别)。
3 边坡实时风险率量化模型
3.1 基于概率可靠度理论的风险率模型 边坡完成预定功能的概率常用 P 表示,而边坡不能完成预
r
定功能的概率则用风险率 P 表示,二者互为独立的不相容事件,存在 P +P =1 的关系。假设边坡某一
f
f
r
功能与 n 个基本随机变量 X ,X ,…,X 有关,则边坡功能函数 Z 可以表示为 Z=g(X ,X ,…,X )。
1 2 n 1 2 n
Z>0 为边坡可靠状态,Z<0 为边坡失效状态,Z=0 为边坡极限状态。基于概率守恒原理,在一般的随
机动力系统中,可以将随机变量通过随机响应的概率密度函数转化为随时间演化分析的偏微分方
程,即根据随机变量的概率分布形式计算边坡风险率:
)
0
P = P (Z ≤0 = -∞ f ( ) z dz (6)
f
Z
式中 f(z)为功能函数 Z 的概率密度函数。
Z
假设边坡荷载为 S,抗力为 R,则可以综合荷载 S 和抗力 R 表示边坡的功能函数 Z 为:Z=R-S。R>S
为边坡可靠状态,R<S 为边坡失效状态,R=S 为边坡极限状态。此时边坡运行风险率公式为:
)
)
P = P (R ≤S = dF (r,s = f (r,s )drds (7)
f RS RS
Ω Ω
f f
式中:F (r,s)为联合累积分布函数;f (r,s)为 R 和 S 的联合概率密度函数;Ω 为失效域,表征 R≤
f
RS
RS
S。
考虑荷载 S 和抗力 R 为相互独立的随机变量,概率密度函数分别为 f (s)、f (r),概率分布函数
S
R
分别为 F(s)、F(r),式(7)改写为:
R
S
+∞
+∞
+∞
)
P = P (R ≤S = -∞ -∞ f ( ) r f ( ) s drds = -∞ F ( ) s f ( ) s ds (8)
R
S
f
S
R
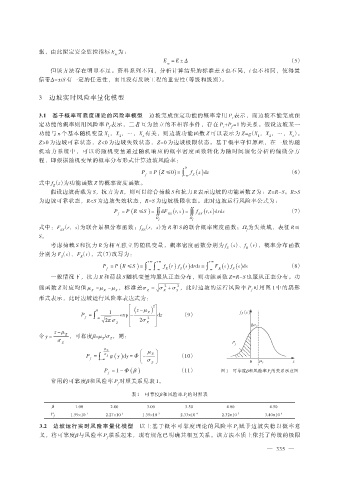
一般情况下,抗力 R 和荷载 S 随机变量均服从正态分布,则功能函数 Z=R-S 也服从正态分布。功
能函数 Z 对应均值 μ = μ - μ ,标准差σ = σ + σ ,此时边坡的运行风险率 P 可用图 1 中的阴影
2
2
f
S
Z
R
R
S
Z
形式表示,此时边坡运行风险率表达式为:
é ) 2 ù
0 ê ê ( z - μ Z ú ú f Z ( ) z
P = 1 exp - dz (9)
f -∞ ê ê 2 ú ú
2π σ Z ë 2σ Z û
z - μ βσ Z
令 y = Z ,可靠度β=μ /σ ,则:
σ Z Z Z P
μ f
- Z æ μ ö
P = σ Z φ ( )dy = Φ ç ç - Z ÷ ÷ (10)
y
f -∞ σ
è Z ø 0 μ Z z
P = 1 - Φ ( ) (11) 图 1 可靠度β和风险率 P 的关系示意图
β
f
f
常用的可靠度β和风险率 P 对照关系见表 1。
f
表 1 可靠度β和风险率 P 的对照表
f
β 1.00 2.00 3.00 3.50 4.00 4.50
P -1 -2 -3 -4 -5 -6
f 1.59×10 2.27×10 1.35×10 2.33×10 2.32×10 3.40×10
3.2 边坡运行实时风险率量化模型 以上基于概率可靠度理论的风险率 P 赋予边坡失稳以概率意
f
义,将可靠度β与风险率 P 联系起来,现有规范已明确其相互关系。该方法本质上依托了传统的极限
f
— 335 —