
Page 116 - 2023年第54卷第5期
P. 116
其次是 9.14~9.79Hz频率范围,电涡流位移传感器的最高峰值点频率为 9.14Hz,与左侧悬臂梁
计算固有频率 9.34Hz比较接近,说明该峰值由右侧悬臂梁共振引起。
表 5、表 6还包含其它 3个尖峰频率,可能和传感器支架、施振机构等固有频率有关。
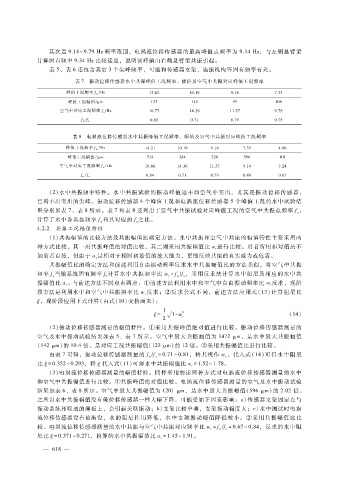
表 7 振动位移传感器水中共振峰值工况频率、幅值及空气中共振对应峰值工况频率
峰值工况频率 f?Hz 13.62 10.19 9.16 7.33
w
峰值工况幅值? μ m 123 142 93 106
空气中对应工况频率 f?Hz 16.77 14.36 11.57 9.79
a
f?f 0.81 0.71 0.79 0.75
w a
表 8 电涡流位移传感器水中共振峰值工况频率、幅值及空气中共振对应峰值工况频率
峰值工况频率 f/Hz 14.21 10.19 9.16 7.33 4.86
w
峰值工况幅值 / μ m 514 284 228 596 101
空气中对应工况频率 f/Hz 16.86 14.36 11.57 9.14 7.24
a
f/f a 0.84 0.71 0.79 0.80 0.67
w
(2)水中共振频率特性。水中共振试验的振动峰值远不如空气中突出,尤其是振动位移传感器,
已看不出突出的尖峰。振动位移传感器 4个峰值工况和电涡流位移传感器 5个峰值工况的水中试验结
果分别如表 7、表 8所示。表 7和表 8还列出了空气中共振试验对应峰值工况的空气中共振点频率 f,
a
计算了水中各共振频率 f和其对应的 f之比。
a
w
4.2.2 共振工况幅值特性
(1)共振幅值的比较方法及共振幅值比确定方法。水中共振和空气中共振的幅值特性主要采用两
种方式比较,其一用共振峰值绝对值比较,其二则采用共振幅值比 a进行比较。后者所用相对值虽不
r
如前者直接,但由于 a是相对于相同初始值的放大能力,更能反映共振的真实威力或危害。
r
共振幅值比的确定方法和前述利用自由振动频率反求水中共振幅值比的方法类似,将空气中共振
频率 f当做系统固有频率 f计算水中共振频率比 w = f?f,采用反求法计算水中阻尼及相应的水中共
r
0
a
a
w
振幅值比 a。与前述方法不同点有两点:①前述方法利用水中和空气中自由振动频率比 w反求,现阶
r
f
段方法是利用水中和空气中共振频率比 w反求;②反求公式不同,前述方法应用式(13)计算阻尼比
r
ξ ,现阶段应用下式计算(由式(10)变换而来):
1 2
ξ = 槡 r (14)
1 - w
2
( 2)振动位移传感器测量的幅值特性。①采用共振峰值绝对值进行比较。振动位移传感器测量的
空气及水中振动试验结果如表 5、表 7所示。空气中最大共振幅值为 1472μ m,是水中最大共振幅值
(142μ m)的 10.4倍,是对应工况共振幅值(123μ m)的 12倍。②采用共振幅值比进行比较。
由表 7可知,振动位移传感器测量的 f?f= 0.71~0.81 ,将其视作 w,代入式(14)可得水中阻尼
w a r
比 ξ = 0.352~0.293 ,将 ξ 代入式(11)可得水中共振幅值比 a= 1.52~1.78 。
r
(3)电涡流位移传感器测量的幅值特性。同样采用前述两种方式对电涡流位移传感器测量的水中
和空气中共振幅值进行比较。①共振峰值绝对值比较。电涡流位移传感器测量的空气及水中振动试验
结果如表 6、表 8所示。空气中最大共振幅值为 1201μ m,是水中最大共振幅值(596μ m)的 2.02倍。
之所以水中共振幅值没有像位移传感器一样大幅下降,可能受如下因素影响:a)传感器支架固定在与
振动系统相联通的薄板上,会引起关联振动;b)支架比较单薄,支架振动幅度大;c)水中测试时电涡
流位移传感器没有被淹没,水的阻尼作用降低,水中支架振动幅值降低较小。②采用共振幅值比比
较。电涡流位移传感器测量的水中共振与空气中共振对应频率比 w = f?f = 0.67~0.84 ,反求的水中阻
r w a
尼比 ξ = 0.371~0.271 ,换算的水中共振幅值比 a= 1.45~1.91 。
r
8
— 6 1 —